��������:
����������� ��� ��������� ����������������. ��������� ���������� ����������� ��������������. ������ ������ ����� ���������: �������� �������� ������ ������ ���� �������� - � ������ ����� � ������ ��������
����� I. �������������� ������ � ������������ � ������������� ���������� �����
1. �������������, ���������� �� ���������������� (����������) ��������������
���������� ������� ����������������: � ����������� � �����������. ��� ������ ������ GPS? ��� �������� �������� ���������� ������� ����������������? ������ GPS-��������, ������������� �� ���������� �����
2. ������� �������, ���������������� ������� ����������� �������� ������� �������������� � ������������
���������� ���������. ��������� ������ � �������, � ������� ����
3. �������, ����������� �� ����������� ���������� ������ �����
����������: ���������, ��������, ����, �������������, ��������������, �����������, ������������, ����������, �����������, ������� �������� � �. �.
����� II. ����������� ������ �������
1. Excalibur: ���������� ������������� ����������������
����������� ������ ��� �������� �������������� ����������� GPS-���������. �������� ����� - ������ ���������. ����������� ������������ � ������ � ������. ��� ������������� ������������������ ������ � ���������� ����������� �����? ��� ����� "��������������� ������"? ������ �������������. ���� ������ ��� ������� ��������������. ������ ������ ������� ��� �������������? ��� ������ ������� ��� ��������� ����������������?
2. ������� ������������ ������ ���������� ������
��������� � ��������� ���������������� ����������������� ������� ������������ ������. ���������� ������ ����������������. �������� ����� �������
3. ��� ���������� ����� �����������?
������� ����� ����������� �������. ������� ��������: ������������� ���������, ���� ������, ������ ����������, �������� ����������, ������������� �����, ���������, ����������� ������� �����, �����������, ���������, ������� �������� � �. �. ��� �������� ���� ������ ������ �� ����� ��������� ��� �����������: �������, ������� � �������
4. ������� �������, ���������������� ������� �������� �� ����������� ������
������ ��� ����������� ���� � ���������� �������������������� ��������. ����������� �������� - � ��� �����, ��� ���������������� ����������
5. ������� ���������� � ������������������ ���������
�� � ����� ����� ��� ����� ������������. ����������� ������������ �����������. ����������� � ����� ������ ������������ ������. ������������ ���������� ������� �����������. ����������� �� 160-������� ������������ ����������, �������������� ������ � ���������� ������� ��������. ��������, ��������� ������������� ������ �������
6. ������� «�������» ������
����������� ������������ ������. ���������� � ������������� ���������
����� III. ����� ������� � �������� ��������� �������
1. ������� ����������� ��������������� ���������
��-����������� ������������� �������. Bluetooth-��������. GSM/GPRS-�����.
2. ���������� ��� �������� ��������������� � ����������� ����������� ���������
�������������� ����������� ��� ���������� �����. ������ ��������� �������. �������� ��������� ������� �� ����� ��������. �������������� ������������� �������������� ��-����������
3. �������������� ���������� ���������� �������������� �������
��������� ����������� � �������� �� ��������� � �������� ������ ��������� 500 � 700 �
4. ����������� ������������ �����
�������� ���� ������������ �����. ������ �������-�������. ��������� �������� �������� ��� �������
5. ������� ����������� ������������ �����
GSM/GPRS/GPS-������. ������� GSM/GPRS-������. ������� ������ ��� �������� ��������������� �� GSM-������ � �������� �������
6. ������������ ������������ �����
����� �������, ���� ������������ - ������� � �����������, ������ �������� �������� ������, ��������������������� ������, ������������ ���� � ����������
7. ������������ ����� �������������� ����������
������� � ����������: �����, ������� ��������, ����������� ���������
����� IV. ��������� � ��������� ��������������
1. ���������������� ����������� (RC �����������)
����-����� �����������. ������� ����� ����������. ����������� ����������� ���������. ������ ����������� ��� ������ ����������
2. ������� �������� ������������ � ������� ����������
�����������. ����-�����
3. ����������������� ���������� ��� ������������ ������� ����������
����������. ������������� �������������� ��������� �������
4. �������������� ������ ��� ������� � ��������� �������
������� ��� ������� ���������� ������� � ���������� ������� �� ���������� �� 3 �, �� 6, 9 � 12 �. ������� � �����������
5. ��������� �������������
����������� �������-�������������� ����� ����������� ��������� � ��������, ������-�����, ������������� �������, ���������������� �����������, ������� ��� ��������� ����� � �������������.
����� V. ������������� �������
1. ������������� ������� �������������� ���������
��� �� ����: ������������������� ��� ��� ���� ���� ����� ��������. ��� ��� ��������, ���� ������ ���������� ����������� �� ���, � ��������� (����� ���������� ��� ����), ��������, ���������� et cetera?
2. MEMS-����������
������������������������ ���������� � ����� ����. ���������� ���� ������ ���������: ������������ � ����������� ���������� �� ����� ���������. ���������� ������������ � ������� ��������. ������������ ���������� � ������������ �������������, ���������� ����� � �. �.
3. ����������� ����
����������� ������ � ����� ���������: ��� 10, ��� 15, ��� 48, ��� 29, TN2, IM, TRR, �449��1��/2��
4. ������� �� ����������� � ���������� ��������� �� 10 ��
����������� �������� �����������. �������������� �������������. ���������, ����������� ��� ������������. ��������� � ���������: ���������� � ������� ������, ���� ��������, ������� ��������, ���������� �����, ����� ��������, ����������� � ������������ ����������������. ���� � ����������� ������
5. ��������� �������������
�������� ������ �� ����������� ������������� ������������ � ������������ - �� ������� � ������, ������ ����; �����-������ � �����-����. ���������� ���������� �������������
���������� 2-�� ������� ����������� "��� ���� ��� � �������������"
��������
��������� ������� ��� ������ ����������������� ������� � ����������������� ������. ��� ������� ����� «��������� ��������������»? ����������� ��������� �������: ����� �� ��������� ������� «�������» �������������� ��������?

����� I. ��������� �����������������
1. �������� «��������� �����������»
��������� ������ ��� ������� ������� - ������ ������. ������� ��������� ��������� ��� ������ ����� �����
2. ��������� �������� � ������ ��������� ���������
��� ����� — ������������� ��� �������������? ������������ � ���������� ������������� ����������. ���������� �� �� ����� ���� «��������� �������»? ���� � �������������� �� ������: ���, ���, �����?
3. ����������� ��������� ��������� ����������������� � ����
��������� ����������������: ��� ������ �������� ������, �� ������ � ������, - ������ ��� � �������� � ���� �������. ��� �������� ����� ����������? ������ ��������� ����������������� ����� �������� ��������?
4. ���������� ��������� ������ ����������� ������������
����������� ������ �������� ����������� ��������� ������� - ���� ����������� �� ��� �� �������, ��� � ����������. ��������� ����������������� �� ����� ���� ������. ��, ��� ���� � ���� � ����� � ���, �������� �� ���������� �����
5. ������������� ����������
������� ��������� ������� � ������������ �� ���������� �������������. ���� � �������, � ������������. ������������� �������, ��������� �������� ���� �����, ����� � ��������� ������ ������� ������
6. ����� ��������� ������ ��� ��������������� ������
��� ����� �������������� �� �������� ���������� ����� - ��� �� �����, �� �������� ��� �� ������������� ������� ������������. ��� ������������ ������ ���� ��������� ������?
7. ����������� ��������� �������
�������� ����� ����� �� ��������� ���������� ����� � ����� ��������� ������������� ������� ������������. ��� �� ���� ������� ������ �� ����� �������� ������������?
8. ��������� �������� �� ��������� ��������������
�����������: ���������������, ���������, ����������� ������� � ����������-���������, ���������, ���������, ������������, ������������ — �� �� ��������� ���������
����� II. ������ � ������ �����
1. ���������������� ���������� ���������� �����������
��� ���� � ����������. ��������� ������ ��� ������� � �����
2. ��������� ��������������� �������
������� � ������! ��� �� ����������� � ������������������: �������� �������� ��� ��������������������. ����������, ���������, ������� — �����������. ����� �������� ��������� � �������� ���������� � ��� ��� ��������? ����������� ��������������: �� ��������������. ��� ��� �������������� ��� ������ ������? �, �������, ������� ����������������� � ����������� ������������� ����������
3. ����������� ������ ��������� �������
������ ������ ������������� ������ ��� ��������� ���������� �������. ���������� � ��������� ������������� ��������. ��������� ��-������: ������ ��� ������ ����, �������� ��������� ������ � ������ ��������� ������ �� �������? �������� ������� ���������� �������. ��������� �������� ���������. ����� ������� ��� �����: ������ ���������� � � ����� ����������?
4. ��������� ������������� ������������������� ������, ���������� � ������ ������
�������������� ����� ������������������� �������. ���������� ������ ���� ����������. ��� ����������� ��� ���������� � ���������� ��������? ��� ��������� �������������� ������� ������������������� �������?
5. ����������� ���������� ������
�������� ���������: ���� ������� ��� ���������? ������� ������� � ������������� ������� ��� �����. ���������� ������� ��������� �������� ��� ������� ��������������� ����������. ����-���������� — � ������ ���������� ������. � ������������ ����������� ��� �����. ��������������� ��������� ������� ��� ������ ������
6. ��������� �������� ����������� � �������������� ��������� ��� ��������� �����
�������� �����������: ��-��� ���� ��� ��������. ���� ����-�� �� �����, ������ «��������». ��������� ��� (����������� ������������� �������) �� ���������� ����
7. ����������������� �������
����������, ������������, ����������������, ���� ������������. ������ ������������� - ������������� ���������� � ���������� ������� ������������
8. ������� ��� �������������
���� � �������� ������ ��� ��������� ������� ����������: ���� � ��������������
9. ��������� ��� ����������� � ���������
��������� ����������� ��� ���� �����. ������ �������� ��������� �����
10. ������������� ���������� ��������� �������
���������� ���������� ��������� ������� ��������� ��������. ������� ������� � ��������� ��������: ����� ����� �������, ������ ���������� ���������? ������� � ������ ����������� ���������� ������
11. ������������ �� ������������ ������� � ������� ����� ����������� �� ������� ��������� �����������
��� ���������� ������ �� �����? � �� ��������������? ��� ���������� ����������������: �������� � ����������, ���������� ������, ������� �����������. ����������� ������� ������. ���� ������� �����: �������� �������, ������� ������������, ������������. ����: ������������, ������������, ��������
12. ������������� ��� �������������� � ������������ �����������
������������� �������� ������-����. ����������� �������� ��� ������� ����� �������������. ���������-����������� �������� ��� �������� ������ ���������� ��������� ��������� � ��������� ���������-������������ ����������
13. ������ ���
���������� ��������� ��������� � ������������. ��������� ����������������� ������. ������������ ������������� ������ �����������. ��������-������������ �����-����. ���������������� ������ ����
����� III. ������������� � �������� �������������� ����������
1. ��������� ��� ��������-�������� ���������
������������� ���������� � ������� �����������: ����� ������� ������� � ����� ������ ���������? ��� ������� ������������ ���������, �������� � ������ ������������ ��������?
2. � �������� ����������� �� ������: ������������, ����������, ����������
������������� ����������� � ���������� ����������� �� ������: ����������� �����������, �������� �����������, ��������������� �����������, ������� �����, �������� �����������, �������������� ���������, ����������� ������, ������������� �������, �������������� �����������, �������������, ����������� ������������, ������� ������, �������� �����������, ������������� �����, ����������������� ���������
3. ������� ��� �������� �����������: ���������� � ��������� ��������
�������������� �� ����������� �������: ��� �� � ���������� «�������-1»? ��� ��������� �������� ���������������� ��� ����������� �����? HDTV: ����� ������������ ��������
4. �������������� �������: ���������� � ������ ���������������
��� ��������� � ����, ��� ������� ����� ��� ��������� ���������� ��������� �������. ��� ������ � ���� �� ������ ���������� ������� �����? ���������� ��� �������� ������� ������� ����� ����������. ��������� �����������: «�������������� ��������» �� ���� ��������������� ���������
5. ��������������� ������ ��������� ������������� ������������������ ������� ����������
����������� ������������� ��������� ��� �������������� ������� � ������ �������� �� ��������. ����� �������� ����������� ������? ��� «���������» ������� � ����������� �� ���������?
���������� ������� � ���������� ��������, �������, ��������, ������������, �������� � ��������� ������, ���������, �����, ������ � �������� ��� ������������� ��� ����� ��������, ������-����������� ���������� �� ����: ������������, �������, ������ (�������, �����������, ��������), ������������� �����������; ��������������, ������ ������, ���� ������� ������ (���������, ���������� ��� ���������� ����������, ��������� - �����������, ��������, ����������), �����������, ������������� ��� ����������; �������������� ��� �����������, �����, ������ ��� ������� �������.
3-� ������ ����������� "��� ���� ��� � �������������" ("���������� � ������� ��� �������� ������� � ����������������� ������") ����������� � ���� ���������� � ��������� �������.
��������� ����� ����� "��� ���� ��� � �������������" (������ ������) - ������ ����� �������� «������ � ������� �����». �������� ������� � ����������� ����, ���� 3-�� ������� - "������-���������� ���������� ������ ��� ��������".
�����������:
������� �����, � ����� ���������������� ���������� ������� �����, ������������, � ������� �� ���������� �����, ���������, �������������� ������� �������� �������������� ������������� � ����������������� �����������.
"��������� ����������������� �������"
������� �� 1-�� ������� (����������� ����� �� ����������)
����������� ��������� �� ����������� �������� ������ � ������ ������� ������� ��� ���� ��� � ������������� (���������� � ������� ��� �������� ������� � ����������������� ������)
���. 15-18
...���������� ���������� GPS � «�������» ������ (GPS ������ �������� ������ � ������������ ��� �������� �����). GPS �������� ��������� ��������� ������ � ������� �� ������ ���������� ��������, ���������� �� ����������� ����������� ���������. ��� ������������ ����� ����������, ����� ������� ������ ������ � ������������ ����� ����������?
��� �������� �����������, ��� ��� GPS ������� ��������� ����������� � �������������� ������������ ������� ��������� ������ � ����� «XY» (���. 1.2). ���������� �������������� �����, � ������� ������ ���������� ��������� - (Xg, Yg), � ������� ���������� ������, ����������� GPS ���������� - (Xr, Yr). ��������� ��������� ����������, ��������� ����� ������ �������� ��� ������� ��������� (ΔX, ΔY), ����� ������� ������������ ����. ����� �������, ΔX = Xg - X r, � ΔY = Yg - Yr.
�� ���������� ������� ���������, ����������� � ��������� �����, ��� �������� �� �������, � ���� X, ������������ �� �����. ����� ������� ����� ������������ ����, �� ������ ������� ��������� �������� ������ �� ����� ��� ����� θ ������������ ��� X. ������������ ������������� �������� ���, ��� ����, ��� ������� �� ������ ���������, ������������ �� ����������� ��������� � ��������� «X» � «Y», �� ����: θ = tan-1 (ΔY/ΔX).
������������ ����� ������ ���������� ������� ����� ���� � ���������� ������� ������; �� ������ ����� ����� ����������� �������� ������. ������ � ����������� � �������� �������� �������� ��������� �������������: ��������� ������� � �������� ���� ������� ����� ������, ������� ����� � ��������� ����� ������� � ������, �� �������� �� �����, ����� ����� ��������.
���. 1.2. ��� �������� ��������� ������, ������������� ����������, ������������ �������� ����������������. �� ������ ��� ���������� ����� ������ ���������������� (����������) �������������� ������ � ����. ����������� ������ (����������� ��� ������� - �����) �������� ������ ��������� ��������� ������.
GPS ������������ ���������� � ��������������, �� ��������������� �� ���� ��� ���� ������. ����������� ������ ������� ��������� ���� ������. ����� ����������� � ����, ����� �������������� �� ��� ���, ���� ����, ������������ ��������, �� ����� ��������������� ���������� �����. ����� ���������� ��� �� ����� «�����������������» � GPS ���������� �� ������ ����������������� ��������������, �������� ���� �� ���������� ��������� ��������������� ����: ��������� ��������� ����, �������������� �� ����������� � ����, � ������������, �������� ���������� ����� ����� � �����.
����, �� ���������� � ��������� ����������� ������ ������ ����� � ����� � ����� ��� ���� ���������? �� ������. ������, ��� �� ������ ������� ������������ ���������� �� ���������� ���������������, ���������� �������� ��� ������ ������, ������� �������� � ������, ������� �������� ��������. ��� ������ - ����������. ������� ���. 1.3.
���. 1.3. ��������� ����������, ��� �������� �� «a», ��� ������� ���������������� ��������� ������� ��������� �, �� ���� ����, ��� ��� ����� ������������, ������� ���������������� ����� �������� ���, ������� �� ����� ������� �� ��������. � ���������, ���������� (����� ��� ��� � ������ ������) ������������ ����������� ����� ������� ���������������� ��������������� ����� �������. ���� ���������� ����� ������� ���������������� - R, �� ��� ����������� ����������, ����� �������� � ����� ��������� ���������, ���������� ��������, �� ������� ����, �� �������� ±R. ��� ��������, ���, � ������� �� ��������� ������� �� ������ ����������, ���������� ������, ����������� �������� ���������������� ����� ������������ ������ ��� �����������������. ������ ����� ������� � ����� ����� �� «b». ����� ����� �������� ����������� ������ ������� ��������� � �������� ����, ������� ���������������� ����� ��������, ��� ����� ��������� � ������ ������. ��, ��� ������ ������ �������� � ������ ������� �� �� ����������� ���������, �������� �� «�» - � ��� �������� ����������. ���������������� ���������������� ������ ��������� �� ���� ������������ ������.
������ ������� ���������������� ����� ����� �������� �������������� �� ���������� �������� ����������, �� ����� �� ������. ��������, �� ������ ������������ ������� ������ � ���, ����� �������� ���������� ����� 1/16 �����. �� �� �� ������ ������������ ��� �������, ����� �������� ������� ����� ������. ����� ��������� ���������� ������ ������� ���������� ������ �������. ����������, �� �� ������ ������������ ������� ������ ����������, ����� �������� ������� �������������� ����. � ��� �� �� ��������� ������ ���������� �� ���� ������� ���������������� �� ������ �������� ����������. ����� �������, ������ ������ � ����� ������� ���������������� – ������ � ����������?
� ����������� �� �������������, ������ ���������� �������� GPS ��������� ����� �� ����� ������� 10 ������. (���� ������ ����� �������� � ���� �������������� �� ����������, ����� �� ������� ���� ������ ��������, ��� ��� ��� �� ��������������� �� �������.) �����������, ��� �� �������� ������������ ����� �������� (������ � ����������� ��������) ����� ������� ������ ���� � ������������ � ���������������� ���������������. �� ���������� ��������� ��������� «�����������» �� ��������� XY-��������������, ���������� ��� Dest_vec.
��������� Home_GPS
Loc_vec = get_GPS_xy () // GPS ����� ������� ������
// ��������������
Disp_vec = Dest_vec - Loc_vec // ������ �������� (displacement)
// � ����� ���������� (destination)
Dist = magnitude (Disp_vec) // ���������� (distance)
// �� ����� ����������
Theta = arctan_vec (Disp_vec) // ������ �������� ����������
// ��������� ����
Heading = Get_compass_heading () // �������� �� �������
// ����������� ���� ������
If (Dist ≠ 0) // �� �������� ����� ����������?
Rotation = gl * (heading - theta) // ����������� ���������
// ��������
Translation = g2 * Dist // ����������� �������� �����������
end if
end Home_GPS
��� ��������, ����� ����� ������ ���� ������ ���? ���� ��� �������� ������������ �� ����������, Home_GPS �������� ������������ ������ ����������� � ����� ����������, �������� ����� ������, � �� ����������, ����� ����� ��������� ������� �����, ���������� Dest_vec. ��, ����������� ���������� �������, � �������� ���� Home_GPS �� ������ ������� ����� ����������. ������ �����, ��� ������ ����� ����� ������������ � ����, ��� ����� ����������� �� ������ ��������.
���� �� ���� �� ����, ���������� ����� ����� ���� ����� ����� �� ������� ��� ��� ����������� ������, �������������� ��������������� � ����� ����������. �� ����� ����� �������� � ���� � �������� 10-20 ������ �� ����, ������ ���������� GPS ������� ������� ���� � ������� ���������� ���������/�������������� ���������, ��������� ���������� Home_GPS.
� �����-�� ������� ������ GPS ����� �������� ������, ��� �� ��������� ������ � ��� ����� ������ �������, ������� � ���� ����� ����������. �� � ��������� ������� ������ �������, ��� ����� ��������� � ������ ����� � ������� ������ ������������ �� 90� ������, � ��� � ��������� ������� - ��� ����� ��������� � ������ ������ �� ���� � ������ ���������� �� 90� �����.
����� ��������� � ��������������� ������, �� ������ ������� ������� ���� �������������, � ���, ��� ����� ����� ���� ������ ���������������� (��� ���������� �� ����) � ����. �� ���� �� ������ ���������� «������� ����» � ������� ���������� ������ Dist = 0. �� ������� ����������� if (Dist ≠ 0)... �� if (Dist > Thresh
.... ������ ����� ����� ��� ������: ��������� �� �� ���������� ������ �� ���� � ����� �� ��������� ������������� - ����� �������� � ���� ����������� ����� ����. �������� ����������� ������������ �������� ���������� GPS �������. ��� �������, ������������ ��� �������� ����������������...
���. 53-55
...�������� �������������� ����������� ��� ���������� �����. ���� ���������� ������ �� ���� ������ ������ ��������� ���� �� ������� f (����� ����� λ) � ����� �������-�������� ����� � ������������� �������� �������� η��� ���� ������ ��������� � ������� � ��������� G���(θ), �� � ���� ����������� θ �������� ���������� ���������� ���������� �������� ����.
� = ���� η��� G��� (θ). (1)
��������� ������� � ��������� ������������, ������������� ����������� ��������� ������ �������� ��� �������� �� ��������� �� ���������� d ����������� �� �������
L0 = 16π2d2/λ2 (2)
����� �������� ������ L0 ������ ����� ����� �������������� ������ L���, ������������� ���������� � ��������� ����� (� ��������, ��-�� ���������), ����������� ��������� ������ � ��. ������� ��������� ������
L = L0 L���. (3)
�������� ��������� ������� �� ����� ��������
��� = ���� (λ2G���η���/16π2d2)*(G��η��/L���), (4)
��� G�� � � - �������� ������� ������� � ��� ������-������������� ������.
����� �������� ��������������� ������� ������� �� ���������, � ����������� �������� S�, ��������������� ������������ ��� ����� �������, ������� ��������������� ��������, ���������
G�� = 4S�/λ2, (5)
��
��� = ����G���η���η��S�/4πd2L���. (6)
����� �������, �������� ������� �� ����� ������� ��������� ��������� �� ��������� �� ������� �������, ������, ��� ���� ������� ������� �������, ��� ������ ��� ��������� � ���������.
...����������� ������������� �������������� ��-����������, ���������� � ��������� ���� 800 ���. ����� ������� ������� ���������� ������������ � ��������� ������ ��������� �����, �������������� ���������� ���� �� ������� � ���������� �������� ����������, � �������������� ����� ���������� ���� �� ������������� ����������. ������ ���������� ���������� ���������� �����. ��������������:
- ���������� ������� ����������, � - 12 ±10%;
- ������������ �������� �����������, �� - �� ����� 3,3;
- ������������ �������� ��������, �� - �� ����� 2,6;
- �������� �������� �����������, �� - �� ����� 0,4;
- ���������������� �������������, ��/�� - �� ���� (-)112;
- ������� ������� ���������� � ��������� ���������� �� -30� �� +50� , ��� – 806 ± 2.
��� �� �������� ������ �������� �������, � ������ ������� ���������� ���������� �����, �� ��������� ������ ����� ������� ������ ������. ������������� ������ ���������� �������� ������������ ������������ ������ �������� ��, ����������� ���� � ����� �������� �������. ������ �� ����������� �������� ������� ����������� �������� ������� �� �����������.
����� ������ �������� ����� ���������� ����������� ������ ����������� ������. ����� ����� ��� ������� �� ������������ ������� ������� � ����������� ������������� 1,1
� = 1,1(2Δf� + 2f�), (7)
��� ��� f� (������ ������������ ��������) ������� �������� ����� ������� ������� ������������� �������. �� ������� (7) �������, ��� ��� �������� ��-������� � ��������� ΔF� = ±6 ��� � ����������� 600 ��� ������ ����������� �� ������ ������ ���� 26 ���.
����� ���������� ��� ����������� ����������� ������� � ���� ������ — ���������� ����� �� ����������� ��������. ���� � ���, ��� ��������� ������ ����������� �� � ���� 2002 �. �������� ������������ �� ��� ���� �������, ��� � ������ ���� �������������� � ����� �� �� ��������. ������� ��� ����� ��������� ����������� ����������, ����� ����� ������������� ���������� �������, ��� ���������� ������� ������������������ ��������� � ��������������� ����� �����, ��������� �������������� ����� - ��������, ����������� ������� ��������.
21.06.02 ������� ���, �������� � ������� ������� ��������, ��������� �� ��������� ���������. �� ����� ��������� �����, ���� �� �� ���������, �� ����������� ��������� � ���, ��� �������� ������ �������� ���� ����� �� ����� ����� - ���� ����������� ��� ��������� ��������. � ��� �� ����, 21.06.02 ����, ������ � ������, ������: «��������� ��������� ������ �������� �� ��������� ������ ������». �������� �� �������� ������������, ���� 23.06.02 ������� ������� �� ������������� ��������� ������, ���� � �������� �� ������� � �������.
���� ������� ����� ������������ �� ����� ���������� �� «���» ���������� �����: «����� �������� �� ������ ����������».
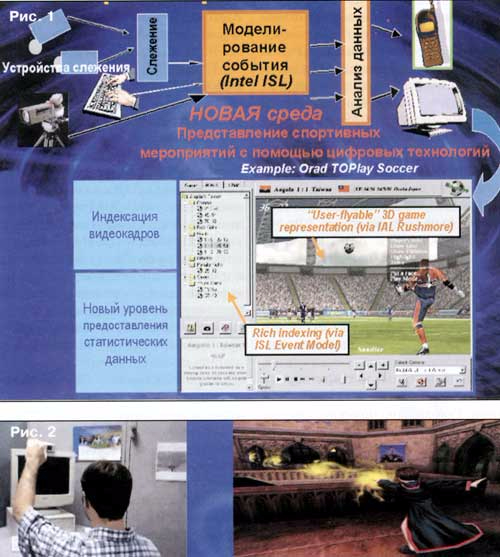
����� ����� ����� ������������� ������ ���������� (��� ������) ����� �� ����������� �������� ����� ���������. � �������, � ����� ��������� 64-��������� �����������, �������� - ��������� � ������ �������� ��������� ��������� � ������� �������� ��� �������� ��������� � ���� ������ (��) � �������� ���������� �������� ��� real-time ������ ������������� ������. ���������� ��� ���, �� ����������� ����� �� - � ���� 2002 �. - ������ ��� � ���� ����������� ������� ���������� Intel: ���������� � ������ ���������� �� EMEA ��� ������� ���������� �������, ������������ �� ���. 1. �����, ��� ������� ���������� ��, � ��� �����-�� ����� ��������: ����������� �������� ���������� ���������� ��� ������� ��������� � ������������� ������. �������� �����, �� ����� �������, ���������� �� ���. 1, ���� ������������ �� ����� �� ���������, ��� �� ������� ����������� �������� ��-�����������.
��� �� �����, ����������� � ������� �� �� ���� ��������� ������������� ����������� � ���� ������������� ������ ��������� ������������ �� ���� �������. ��� ���������� ������� � ����� ������ � ������������ ������������� ������ (�� ���. 2 - ������������� � ����� ���������� ����� �������� ������� ���������� ���� ������� ������ ��� �������� ������� - ��� ������ � ���������� ��������) - ��������� � ����������� «����������������» ���������.
���������� ������ � �������� ���� ����� �� ����� ��������-��� - �������� ���������� ������ ����� ������������� ���������, ������� ����� ������� � �� ������������ �������. � ������ («��») ������ ����������� ����� ��������� �������� ���� ������, �� �� �� ��� �������� �� ��������� (���� ��������� �����������) �� ������������ �������, �� ������� ������ ������ �������.
��������, �� ����� ������� ���������� ��������������� �������. ���: � ������� ������ ���� ���� � � ����� ���� ����������� �� �� ��������, �������� ����� ���������. ������ ����� �������� �� ������ ����� ���� ��� ������, ��� ��� ����� ������� ���������� ������ �� ������ ������ �������. ����� ������ «��������» ������ �� ��������������� ������: ���, ����� ����������� ��������, ���������� ���������: ��������� ������� ���������� ���������� �� ���� 2002 �. �� ���� ���������� - 300 ���. ����. �������, � ���������� �������� ����� �������� �������������� ������� �������� ��������� �������� ��������� ����������� �. �. «�����������»: ������� ����� ������������ �� �������� ������� 9 ���� - ���, �� ����, ������� ��-������� ��������� ������� (��������, ��� ������� ��������� �� ������ ��������� ���������������� ��������� �����������). �� ��������, ��������, ����� 9 ���� ��������� ��������� ������� �. ������, �������� � ����������, ������, ��� ���������� ������������� ��������� �����, ���������� �� ��� �� ������� ������, �� �������� �������������� ���� ������-������.
� ���� �������������, � ����� ������ ������ ������ ������ ���������� ����� �� ������� - ��� �� ������ ���� �� ���������� �����. ��� ��������, ��� � ����� ���������� ��� ��������� ������.
«������ ��������� ������� ����� � ���� � ��������� ���� - �������� ������ �������� ���������� �������» («�����» � 23, 2002 �.). ���� �� ������ �������! �� ��� «�������» ���������� ������ (��� � �� ����������) ������ � ���, ��������� ��� ����������� �������� �� ��� �������� ����� ������� «����� ������ ����� ������», ����� ������ ������ ����� ����� ����������. � � ����� ����������� ������ ��� �� ����������, ��� � ���������������� ��������� ���������� ��-�����������. ����� ����: ����������� ����������� ������ ����� �������������� ���������, ��������������� «��������� ��� ����». ������� ������������ �������, ���������� �� ������� ��������� �����������, ����� ������������� �� ����� �������� � ������� ����� ������ ����� ��� ��������� - ����� ���� �� ��������.
���������� ��������� � ���, ��� �� ���������� � ��� �����. � ���� ����� (������, � ���� 2002 �.) ����������� ����� ��� �� �� �����: ����� ����� ������������� ������ �� ����� ������ - �� ���� ��������������. �������������� ������� ����� (��� ��� ��� ���� ������� �����) ���������� �������, �� ���������� ��-������ �� ����� �� - ���������� �������� ���� ������� ����. ��� ��������, ������� �������������� ������ ������� �������� � ���� ���������� �������� � ���������������� ����� �� ��������� � ����-����-����: «����� ��� �� ����������, ���� ��������� � ����� ������� �������������». �������������, ������������� ������ ���� �����, ��� ��������, ������� �� ���������� ����� �����������, ��� ��������, ������� ��� �� �������, ��-�� ��������� ������� ������� ������� ���������� ������ �� ����: ���� ������� �� ���������� - ��� ����� � 1 � ������ �����.
�� ��� �������, ���� ��� ���� �������, ��� ��������� ���������� ������������ �� ����� �������. � �������� �� ������� ���������� ������ ���������� � ����� «��������� ������» ������ ������: �������� �������� ������ �� ������� - � ����� ���� ��������� ����� ����-����-����, ����� ������������������ ����������� ���� ����� � ��������. � ��� �����, ��������� ���������� Intel, � ������ ���������� ����� ����������� �������, ������� ������ ���������� ��������� ����������� ������� ���������� RoboCup. ��� � ����� �� ��� ������ ���������������, �� ����� ������� ��������� �����������: ����������� �� �� �������������� �����������, ����������� �� ����� ������ �������-������� - ��� ������� ������������� ��������������������� �� «�����������» �, �������������, ������� �� ���������.
����� �������, ���� ���������� ����� ������� � ���� �����������, �������� ��� ���������� � ������ ���� ����, �� ��� �� ��������, �� ��������� ���� ����������� �������. ��� ������������ ����� ���� 2 ����, ����� � ���� ��� ��������� ������ ����������� ��-154 � �����- 757, � ���������� ���� ����� 71 �������, �� ��� - 52 ������. ������� ���������� ���� ����������� � �������� �� ������ �� �� «���» � 6 � ������ «������ - «�������» ��������� ������». ���� ������ ��������������� ����������� ����� ������� ��, ����� ������ ���������� ��� �������, ��� ��������� �� ����� ������: ������� ��������� ������ (�� ��� ���������� ����� ��� �������� ������� ������) ��� ��������� ���������� (�� ��� ��������� ��������). ���������� ���� ��������� �������� �� ������ (��� � �������� ������������ �����), ��������� ����������� «������» ����� � ���� ����������� ��� ������� ����. ��������� ��� ����� ���������� - �������� ���� ����������� ����� �������: ������ �������� ���� ��������� �� ����� �� ��-154, ��� � ���� ������� ������ � ����������� ������� ��������, ����������� ��������� �������������� ������� (��� �� ������������� ��� ������� � ��� ����� � ��������� ����������� ������ «�����»).
������� � ���� ������� ��, ��� ��������� ��������� ���� ������ �������������� ���� ���������� �� ������ «�������� �� ����������», ���� ���������, ������ �����, ����� � ������ ������������� ���������, ��������������� ��������� ��� ������������, ������ �������, ��� ���������, ����������� ���������. �, ��� ������������ ����������� ��������, �������� ����� ��������� ��������������� �� ��� ����� ������������ ������������ - ������� ���������� ���������.
������������������� ���� ������������ �� �������� «��������-2002» ������ «����-�������». ������ «�������������������» ���������� ���������, ��������� ��������������������� ������� (���) ����������� ������������� ���� � ������� ����������� - ���, � ���������, ������ ��������� ������������� �������� ������������� ������� �� ������ ���������� �������� ��������� ������. ����������� ����������� �� �������� ���� ������������������� ���������������. ������������� �� �������� ����� ���������� ������� � CCD-������� �������� ���������� ��������� ����������� �����������, ������� ��������� �� ����������������� �/� �������. ����������� ����������� � �������� �������. ��������������� � ��� ����������� ����������-����������� ���������� ��������� � ����� ������� ��������� ������������� ����������� ������.
� ���������, ��� ��������� ���������� ��������, ��� ����� �������� ��������, ����������� ���������������� ������ �������������� ������������ 60 ����/�. � ��-������� �������������� ������������, ��� ������� ���������� ���������� �������� ����� CCD-�������, � ����� ������, �� ���������� ������� ����� ����� ������������ ����������� ������ �������� ���������� ������������ ������ � �������� ������ ����������� �������� ������������ ������. ��� �������� � ������� ���������� � ����������������, � ���������� ���� �� ������, ��������, ��������� ������ �������. � ��������, ���� ����� ��������� �������� �������� �������, ��� ����� ���� �������� �������� �� ��������� 120 ����/�. CCD-������ � ��� ����� ����� ���������� 1024 � 1024 � 10-��� ����� (1024 �������� ������), ��� ������������ ����������� �������� �����������. � �������� ������������������� ��������������� ����� ���� ����������� ������� �������� �� ������ ��������� �������.
������������ �������� ��� ����� ���� ������ �� 12 ���, ��� ��������� �������� ����������� � ���������, ���������� ������������ �� ������������� �����. � ���� �� ��������� ���������� - «��������» - �������� ��������� �������� 16-��� ��������, ���������� � ������������ ����������� �� 65535 �������� ������ � � ���������������� ����������� �� 2048 � 2048 ��������.
�������� ����� ��������������� ��������������� ��� �������� «������� ��������������� ���������». � ����������������� ����������� ����� ���� �������� ��������� ������: ��� �������� � ����� ������� - �� 120 ��, ��� ����� - �� 85 ��.
����� ������������� ��� ��� �������� ������������ ������������ - �����������, � ���������, ��� ������ ����������� ������� �������� ������ � ���������, ���������������� ����������� (����� ���������� ����������� ����������� ������������ ����� ��-������ ��� ��������� ������������ ������ ������, ��������� ������ «�������» � ��������� �������� ������� �����������).
� ���� ������ ��������� �������������� �� ���� �� �������� ������ Consistent Software ������ Dynamic Designer ��� ������������� � ��������������� ������� ����������. ������������� ��������� ��������� �������� (� ������ ������) ������������� ���������� � ��������� �������� ����������� � ������� ��������, ����������� � � ���������: ������������� �����������, ��������� � ��������� ����� ����� � ���� ��������, ��������� ������� ��� ������ ������������� ��������������� � �������� �������, �������� �������� ������ � �. �. ������������� ������������� 7 �������� ��������, � � �������� �������������� ������ ����� ��������� �������� � ���������� �������. ������������� ������������ ������ � �������� � ����� ����������� ����������, �������������� �������� � ���������� ��������, �������� � �������-���������� ����, ������� �������������� �� ����� �����-����� � �. �. �. �.��������, ������ "���", � 9, 2002 �.
 ������� ���������� ���������� ��������� (������� �� ��������-�������������� �������)
������� ���������� ���������� ��������� (������� �� ��������-�������������� �������)

 ������������� - ���� �� �������� ������� ������������� ��������� � ����������� � ������ ����� ������������� ��������� ����������� �����-��������� � �����, �� ���������� ��������������� ���������� �� ��������� �������� (i-�����). �� ��� ��� ��������� ������������� ����� ���� ����� �� ������ ��������� �������, �� � ��������� � ���������� �����������, ��� ��� �� ����������� ����������� ���� ������������ ������� ��������. �� ������ ��� ��� i-����� ��������� ������� � ������������� ����������� �������. � ���� ���� ����������� �������������� ������ �������� ���������� � ������ ����: ����������� III ������������� ���������� ������� ����� ����� 30 �������� ������, ��� �� �����, ������� i-����� � ������ �� ��� ����� ���������� - "��������", "����������" � "��������" �������� ������ �� �������� ����: ���� �������, ���� �������, ���� ��������. ��� ����� �� ����������, ������ ���� ����������� �� ��������� ������������ LEGO Mindstorms (Robolab).
������������� - ���� �� �������� ������� ������������� ��������� � ����������� � ������ ����� ������������� ��������� ����������� �����-��������� � �����, �� ���������� ��������������� ���������� �� ��������� �������� (i-�����). �� ��� ��� ��������� ������������� ����� ���� ����� �� ������ ��������� �������, �� � ��������� � ���������� �����������, ��� ��� �� ����������� ����������� ���� ������������ ������� ��������. �� ������ ��� ��� i-����� ��������� ������� � ������������� ����������� �������. � ���� ���� ����������� �������������� ������ �������� ���������� � ������ ����: ����������� III ������������� ���������� ������� ����� ����� 30 �������� ������, ��� �� �����, ������� i-����� � ������ �� ��� ����� ���������� - "��������", "����������" � "��������" �������� ������ �� �������� ����: ���� �������, ���� �������, ���� ��������. ��� ����� �� ����������, ������ ���� ����������� �� ��������� ������������ LEGO Mindstorms (Robolab). ������� ����� ��������� ��������������� � ���������������� LEGO-�������, � ����� ���� �������� ������ �� ����������� �� ������� � ������������� ����� ���������� � ������� �������������, ���� �������� �������.
������� ����� ��������� ��������������� � ���������������� LEGO-�������, � ����� ���� �������� ������ �� ����������� �� ������� � ������������� ����� ���������� � ������� �������������, ���� �������� �������. ������ �����-������ ����������� � ��������� "����� ��� ����". ��� �������� ��������������������� ������ ��� ������������������� ����� ������ "����������������" ������: �������, �����, �����, ����. ��������������, ��� �������� ������ ����� ��������� ������� ��� ����������� �������� ����� �, ��������, ������ ����� �������, ��� ��� ��������� � ������������ "�������" ���������� ������, �� ������ ������ ����������, ������������ ������������ � �������� ��������� ��������, � �� �������� ��� ��������� �������� ���������. ������ �������, ���� ������ ����������� "�����", �����, ��������, ��������� �������� � ������� �����.
������ �����-������ ����������� � ��������� "����� ��� ����". ��� �������� ��������������������� ������ ��� ������������������� ����� ������ "����������������" ������: �������, �����, �����, ����. ��������������, ��� �������� ������ ����� ��������� ������� ��� ����������� �������� ����� �, ��������, ������ ����� �������, ��� ��� ��������� � ������������ "�������" ���������� ������, �� ������ ������ ����������, ������������ ������������ � �������� ��������� ��������, � �� �������� ��� ��������� �������� ���������. ������ �������, ���� ������ ����������� "�����", �����, ��������, ��������� �������� � ������� �����. ��������� ���������� � ����, ��� � ������ ���������� ����� ��������� ������� «�» � �� ���� (�������� ����� «�», �������� - «3»); ����� �������� ������, ������������ � ����� «1» (����� ���������������� – «10»), ���������� «�����», �� ����� ��������������� (��������� �������� ����� «�»), ���������� ������� «����» � �� ��� �� «�������» «�����», ������ � � ������� (���� ������� �������� ������ ����� – «�», �������� – «3»); ����� ��������� ��������������� (��������� �������� ����� «�»), ������� «����» ������ � ����� ���� ������ �� ��������� «�����». ��� ��� �� ���� � ����� ������ ������ «�����», �� ��������� ����������� ������ ����, � �����, ����� ������ ������, ����� ���� ��� 2 ���. (�������� ����� «�», �������� – «3»), ����� �� ��������������� � ��������� �������������.
��������� ���������� � ����, ��� � ������ ���������� ����� ��������� ������� «�» � �� ���� (�������� ����� «�», �������� - «3»); ����� �������� ������, ������������ � ����� «1» (����� ���������������� – «10»), ���������� «�����», �� ����� ��������������� (��������� �������� ����� «�»), ���������� ������� «����» � �� ��� �� «�������» «�����», ������ � � ������� (���� ������� �������� ������ ����� – «�», �������� – «3»); ����� ��������� ��������������� (��������� �������� ����� «�»), ������� «����» ������ � ����� ���� ������ �� ��������� «�����». ��� ��� �� ���� � ����� ������ ������ «�����», �� ��������� ����������� ������ ����, � �����, ����� ������ ������, ����� ���� ��� 2 ���. (�������� ����� «�», �������� – «3»), ����� �� ��������������� � ��������� �������������. ���, ��������, �������, ���������� �� ���. I. ��������� ��, ��� ����� ������� ��������, �� ���������� ����������� �������, �� ������ �������� «�����-����� 2003» (��. «���» � 9 �� 2003 �.), ����� ��������� �� Lego, �������������� ����������� ��������� ����� � ������ ��� ����� ������. � ����� — ������� � ����� �������� ������ Lego: ���������� �� ������ ��� ��������� ������������ RoboLab, ���������� �� ������������ ����� ���������������� LabVIEW, ������������� ������ National Instruments � ����������� � ��� �����, ��� ���������� ��������������� ����������� ����������� ������������ (��. «���» � 1 �� 2003 �.). �� ����, ����������� ����� ��� ������: ������������������� ������, ����������� ����������� ����������� �������. ������� ��� ����������� ������ ����������� � ����� Lego Mind Storms: ���������� Lego-�����������. ��� �������� ��������������� �� �������� (�� ����� ��������� ��� �� iBook Apple) � ����������� ����� ������������ ���������� — �� ����� �� ���. 2 ����� � ���������.
���, ��������, �������, ���������� �� ���. I. ��������� ��, ��� ����� ������� ��������, �� ���������� ����������� �������, �� ������ �������� «�����-����� 2003» (��. «���» � 9 �� 2003 �.), ����� ��������� �� Lego, �������������� ����������� ��������� ����� � ������ ��� ����� ������. � ����� — ������� � ����� �������� ������ Lego: ���������� �� ������ ��� ��������� ������������ RoboLab, ���������� �� ������������ ����� ���������������� LabVIEW, ������������� ������ National Instruments � ����������� � ��� �����, ��� ���������� ��������������� ����������� ����������� ������������ (��. «���» � 1 �� 2003 �.). �� ����, ����������� ����� ��� ������: ������������������� ������, ����������� ����������� ����������� �������. ������� ��� ����������� ������ ����������� � ����� Lego Mind Storms: ���������� Lego-�����������. ��� �������� ��������������� �� �������� (�� ����� ��������� ��� �� iBook Apple) � ����������� ����� ������������ ���������� — �� ����� �� ���. 2 ����� � ���������. �� ���. 2 ���������� ������� ��������������� ������� Robotics Invention System 2.0, � ��������� �������� ������� ������� ��� ������ ���������� ��������� �� ������� ��������� «����������» �� ���������� ��������� ����� ���������� �����������. ���� �������� ��������� ������� ��� ��������� �� Lego, ���������� ��� ������ ������������ ������: �������� � ���������������, ������ � ����������� �����������, �������� ����������� ������, �������� �������� �� �������� ����������, ������������ ������������� ������ — �� ����������� �� �������� ����� ��-���������� �� ������ �������� �������� � �������.
�� ���. 2 ���������� ������� ��������������� ������� Robotics Invention System 2.0, � ��������� �������� ������� ������� ��� ������ ���������� ��������� �� ������� ��������� «����������» �� ���������� ��������� ����� ���������� �����������. ���� �������� ��������� ������� ��� ��������� �� Lego, ���������� ��� ������ ������������ ������: �������� � ���������������, ������ � ����������� �����������, �������� ����������� ������, �������� �������� �� �������� ����������, ������������ ������������� ������ — �� ����������� �� �������� ����� ��-���������� �� ������ �������� �������� � �������. �� ���. 3 ���������� ���������������� ������ «�����» ��� �������� ��������, ������� ������� ����� � �������������, ����� ���������������� � ���������� �������� ������ � ���������������� ����������, ����������� �������� 12 ��/�. ����� ������ � ������
�� ���. 3 ���������� ���������������� ������ «�����» ��� �������� ��������, ������� ������� ����� � �������������, ����� ���������������� � ���������� �������� ������ � ���������������� ����������, ����������� �������� 12 ��/�. ����� ������ � ������ �������� iRobot (���� �� �������������� �������� Acer � ������� �������������), ���������� � 1990 �., � �������������� � Acer Technology Ventures (���� �� �������� ���������� iRobot) ����������� ������-�������� Bloodhound ��� �������� ������� ������ � ������������� ��������. ����� ���������� ������, ����������� ��� ��������� ������������� �� ���������� ��������� � �������� �����������. ��������� ��������, ����� �������� �� ���� �������. ������� ��� ������ �������� ������ ������� �������� �������. ��������������� ��������� ������ ������� �� �����������, ������������ ���������� � ���������������� ��� ������� � �������. ������ ����� ����������� ������� �������� ������ ������ ����������� ��������� ��� ��������� ������������ � �������������� �������� (������, ���������, ����������� � ��.). Bloodhound���� ������ ��������� �� ������������������ «������� ��������», ������� ����� �������� �� �������, ��������� ������������ ������� � ���� ���, ��������� �� ������.
�������� iRobot (���� �� �������������� �������� Acer � ������� �������������), ���������� � 1990 �., � �������������� � Acer Technology Ventures (���� �� �������� ���������� iRobot) ����������� ������-�������� Bloodhound ��� �������� ������� ������ � ������������� ��������. ����� ���������� ������, ����������� ��� ��������� ������������� �� ���������� ��������� � �������� �����������. ��������� ��������, ����� �������� �� ���� �������. ������� ��� ������ �������� ������ ������� �������� �������. ��������������� ��������� ������ ������� �� �����������, ������������ ���������� � ���������������� ��� ������� � �������. ������ ����� ����������� ������� �������� ������ ������ ����������� ��������� ��� ��������� ������������ � �������������� �������� (������, ���������, ����������� � ��.). Bloodhound���� ������ ��������� �� ������������������ «������� ��������», ������� ����� �������� �� �������, ��������� ������������ ������� � ���� ���, ��������� �� ������.  ������� ������������� � ������� ���� �� �� ������ ���������������� � � ������ ���������� ���� – ���� �� ������������, ��������������� �� �������� «���������-�����-2004». ��������� �������� � ���, ��� ����������� �����- � ��������������� ������ ������� ������ ������� �� ����� ����������� «������������» ��������, � ����� ������������������ ��������������. � ����������, �������������� �� ����� ���������, �� ����� ������ �������������� ���������, ��� ���������� – �� ��� �������, ����� ��� ����� ���� ������������ ��� ������ ������.
������� ������������� � ������� ���� �� �� ������ ���������������� � � ������ ���������� ���� – ���� �� ������������, ��������������� �� �������� «���������-�����-2004». ��������� �������� � ���, ��� ����������� �����- � ��������������� ������ ������� ������ ������� �� ����� ����������� «������������» ��������, � ����� ������������������ ��������������. � ����������, �������������� �� ����� ���������, �� ����� ������ �������������� ���������, ��� ���������� – �� ��� �������, ����� ��� ����� ���� ������������ ��� ������ ������. I. ������������-������������ ������� (���) "�����", ������� ������� �������� � ��: 2020 (�����) � 520 (������) � 270 (������). ����������� ��������� ����� ������� �������� - 18 ��. ������� ������� - 1200 �. ������������ ����������������� ����� �� ������������� �������� �� ������ � = 0 �, � ������� ������� 5 �� � ������������ ������� ����� - 2,4 ���. ���������� ������������ ��� ������ � �������� ������ ��������� ��������� �� ���� ���������� ����� "Futaba - ������������ ��������". � ������� ������������, � ����� �������, ������ ���������� ����������, 3D ��������������, ������� ������������ �������� ���������. ������� ������������ ��������� ������� ������������ ��� � �������� ������ ��������� ��� �������� �������� �� 15 �/� � �����. �������������� ������������ �������� ��-����� �������� ���������� � ���������� ������, ���������� ���������� � �������� ���������� (��������� �� ����� 30 ��), ���������, ����������� ���������� ����������� �����, ������������� ������� �� ���� GPS, ����������� ����� �����-�������� ������ (�������� �� 100 ����/�). �������������� ������������ ��������� ��������� ���� �� ��������� �� 25000 � ��� ����������� �������� ��������� � ��� �� ������� �������������� ��������� � ������������ �������� ��������� �� ����� ����� �����.
I. ������������-������������ ������� (���) "�����", ������� ������� �������� � ��: 2020 (�����) � 520 (������) � 270 (������). ����������� ��������� ����� ������� �������� - 18 ��. ������� ������� - 1200 �. ������������ ����������������� ����� �� ������������� �������� �� ������ � = 0 �, � ������� ������� 5 �� � ������������ ������� ����� - 2,4 ���. ���������� ������������ ��� ������ � �������� ������ ��������� ��������� �� ���� ���������� ����� "Futaba - ������������ ��������". � ������� ������������, � ����� �������, ������ ���������� ����������, 3D ��������������, ������� ������������ �������� ���������. ������� ������������ ��������� ������� ������������ ��� � �������� ������ ��������� ��� �������� �������� �� 15 �/� � �����. �������������� ������������ �������� ��-����� �������� ���������� � ���������� ������, ���������� ���������� � �������� ���������� (��������� �� ����� 30 ��), ���������, ����������� ���������� ����������� �����, ������������� ������� �� ���� GPS, ����������� ����� �����-�������� ������ (�������� �� 100 ����/�). �������������� ������������ ��������� ��������� ���� �� ��������� �� 25000 � ��� ����������� �������� ��������� � ��� �� ������� �������������� ��������� � ������������ �������� ��������� �� ����� ����� �����.  II. ������������-������������ ������ (���) "�������" ��� ���������� � �������� ������� � ������� �� 1000 � �� ����� ������. ������� �������� ��� � ��: 350 (�����) � 120 (������) � 950 (������). �� ����� ����������� ����������� � ������������ � ��������. ���������� ����� ������� �������������� �� �������� �������� ������� �����. ������ � ����� ���� ������ 72 ����. ����� ������������� ���� ��������� �� �����, ����������� � ������ ����� 30-50 � ��������� ��������� �����, � � ������ 50-100 � - ����������. ���� ������� ������������ � ����, ������� ��������� - 10 �. ���������� ������������ ��������� �� ���� ���������� ����� "Futaba", � ������� ������������ ������ ���������� ����������, ���������� ������� ������������ ������������� � �������� �������. � ������� ������������ ������ ������������ ���������, ��� �������, 5 ���������� �������������, ������� �������������� ����������, ��-������� (������� ������ �������� ���������, ����������, �������, �������, 12-�� ��-�������), VHS ���������������, ���, ���. ������� ������������ ��������� �������� ������������ ��� � �������� ������ ��������� ��� �������� �������� �� 10 �/� � �����. �������������� ������������ �������� ������������� ������� �� ���� GPS (�������� NMEA-0183), ��������������� ��������� � �������� �� �������� �������������, �������������� ��������� �� ������� � �������� �������, 35-�� ��-�������, ���������� ����-����, �������� ���������������. �������������� ������������ ��������� ������������ ���� �� ���������� �� 1 ��� (��� ����������� ���������� ����� �� +10 ����. �) � �� ��������� �� 2500 � �� ����� ������, �������� ������� ���������� �������������� �������. ����� �������������� ������������ ��������� ��������� ���� ��� ����������� �������� ��������� � ���.
II. ������������-������������ ������ (���) "�������" ��� ���������� � �������� ������� � ������� �� 1000 � �� ����� ������. ������� �������� ��� � ��: 350 (�����) � 120 (������) � 950 (������). �� ����� ����������� ����������� � ������������ � ��������. ���������� ����� ������� �������������� �� �������� �������� ������� �����. ������ � ����� ���� ������ 72 ����. ����� ������������� ���� ��������� �� �����, ����������� � ������ ����� 30-50 � ��������� ��������� �����, � � ������ 50-100 � - ����������. ���� ������� ������������ � ����, ������� ��������� - 10 �. ���������� ������������ ��������� �� ���� ���������� ����� "Futaba", � ������� ������������ ������ ���������� ����������, ���������� ������� ������������ ������������� � �������� �������. � ������� ������������ ������ ������������ ���������, ��� �������, 5 ���������� �������������, ������� �������������� ����������, ��-������� (������� ������ �������� ���������, ����������, �������, �������, 12-�� ��-�������), VHS ���������������, ���, ���. ������� ������������ ��������� �������� ������������ ��� � �������� ������ ��������� ��� �������� �������� �� 10 �/� � �����. �������������� ������������ �������� ������������� ������� �� ���� GPS (�������� NMEA-0183), ��������������� ��������� � �������� �� �������� �������������, �������������� ��������� �� ������� � �������� �������, 35-�� ��-�������, ���������� ����-����, �������� ���������������. �������������� ������������ ��������� ������������ ���� �� ���������� �� 1 ��� (��� ����������� ���������� ����� �� +10 ����. �) � �� ��������� �� 2500 � �� ����� ������, �������� ������� ���������� �������������� �������. ����� �������������� ������������ ��������� ��������� ���� ��� ����������� �������� ��������� � ���. ���������� ��������� ��� ����������� ��� "�����". ���� ��� � ��������� �������������� ���������� "������".
���������� ��������� ��� ����������� ��� "�����". ���� ��� � ��������� �������������� ���������� "������".  �� �������� �����, ��� ������ �� ��� ���������� ��������� ��������� � ������� ��������.
�� �������� �����, ��� ������ �� ��� ���������� ��������� ��������� � ������� ��������.  ����� ����� ���������� - �� 60 ���. ������ ���������� - �� 25 �� � ������������ � �� 10 �� � ��-��������. ������, ���������� �������� ������������ �����������, ��������� ������ ����� �������� ��������. ��������� �������� - 65-105 ��/�. �������� �������� - ������������� � �� ������������, �������� �����������. ����������� ����������� �� ��������� � ������ 200 � � �� �������� - 0,3 �, � ������������ - 0,1 �. ������ �����: ����������, ��������������, ���� �����, �������������� �������. ��������� - GPS. �������� ����������� ��������� - 25 �. ������� ��������� - ���������������� (� ������ ����� ���� - ��������� ����). ������ ������ - ����������, ��������� ����, ������ ������� - �� ��������. ������� ����� - 2,8 ��. ������ ����� - 1,47 �, ����� �������� - 0,45 �.
����� ����� ���������� - �� 60 ���. ������ ���������� - �� 25 �� � ������������ � �� 10 �� � ��-��������. ������, ���������� �������� ������������ �����������, ��������� ������ ����� �������� ��������. ��������� �������� - 65-105 ��/�. �������� �������� - ������������� � �� ������������, �������� �����������. ����������� ����������� �� ��������� � ������ 200 � � �� �������� - 0,3 �, � ������������ - 0,1 �. ������ �����: ����������, ��������������, ���� �����, �������������� �������. ��������� - GPS. �������� ����������� ��������� - 25 �. ������� ��������� - ���������������� (� ������ ����� ���� - ��������� ����). ������ ������ - ����������, ��������� ����, ������ ������� - �� ��������. ������� ����� - 2,8 ��. ������ ����� - 1,47 �, ����� �������� - 0,45 �.  �� ������ ����� SET-1 ����� ���������� ����������� ������ ��� ��������������� - ��� ������������ � ������������. ����� ������������ ����� - "�����", ��������� ���������� �������� �������� ���������������� � ���������� ��������� ������������. �������� ������������ ��� �����-�������� ���������������� �� ���������� �� 10 �� �� �����������, �������� ��������������� ���������� � �������������� ���������� �������������, ������������������, ����������� ������������ � ��������� � ���� �������������. ������� ����������� �� 16-�� �������� �����. �������� ������ ����������� - 350-2500 ���.
�� ������ ����� SET-1 ����� ���������� ����������� ������ ��� ��������������� - ��� ������������ � ������������. ����� ������������ ����� - "�����", ��������� ���������� �������� �������� ���������������� � ���������� ��������� ������������. �������� ������������ ��� �����-�������� ���������������� �� ���������� �� 10 �� �� �����������, �������� ��������������� ���������� � �������������� ���������� �������������, ������������������, ����������� ������������ � ��������� � ���� �������������. ������� ����������� �� 16-�� �������� �����. �������� ������ ����������� - 350-2500 ���.  �� �������� �� ����������� ������ ��������� �������, � ������ � �����������, ��������� ������ ��� �������� ������������ ������ �������� �������. "���������" - ���������� ����� ITV, ��������� ������������ ����������� �������� � ���������� �� ��� �����������. ������ ���� � ������������ � �������:
�� �������� �� ����������� ������ ��������� �������, � ������ � �����������, ��������� ������ ��� �������� ������������ ������ �������� �������. "���������" - ���������� ����� ITV, ��������� ������������ ����������� �������� � ���������� �� ��� �����������. ������ ���� � ������������ � �������: �������������� ��������������������� �������� ������� ����� "�������� �������" ������ �������� ��� ������ ������ �, � ���� ��, ��������� ���������� �������. ������� ��������� ������������ ����� ������������ � ������� ��������� ����� � ������������ � �������������� ����������, ������������ � ������������ ������� ���� � �����, ������� �� ���� � ��������������� � ������������ �������� ��� ������������� ����� � ��������� ����������, �������� ��������� �� ���� �������� � �������� ��������� ��� �������� ��������. ���������� �������� ������ � ������� (0,4-0,7 ���) � ������������ (8-12 ���) ����������. ��������� ���������� �������� �����������, ���������� �� ����� ����� 1,54 ���, ��� ���� ������� ������� ������� ������ ���������� �� ����� 1 ���. ���.
�������������� ��������������������� �������� ������� ����� "�������� �������" ������ �������� ��� ������ ������ �, � ���� ��, ��������� ���������� �������. ������� ��������� ������������ ����� ������������ � ������� ��������� ����� � ������������ � �������������� ����������, ������������ � ������������ ������� ���� � �����, ������� �� ���� � ��������������� � ������������ �������� ��� ������������� ����� � ��������� ����������, �������� ��������� �� ���� �������� � �������� ��������� ��� �������� ��������. ���������� �������� ������ � ������� (0,4-0,7 ���) � ������������ (8-12 ���) ����������. ��������� ���������� �������� �����������, ���������� �� ����� ����� 1,54 ���, ��� ���� ������� ������� ������� ������ ���������� �� ����� 1 ���. ���. ������, ����������� ���������� ����, ����� ���� ��������, ������� �����, ����� ��������� �������� – � ��������, � �������� �����������, � ������. ���������� ����������� �������� � �����. �������� ����� ��������� ����������� – ��� ����� �������������� �������� ������, � �� ������ ����� ��������������������� �������, �������, �� ��������� ����������, ��������, ��������� ������ ������ ���������. ����� �������, ����� ������� ��� ������� �� ��������������, ������� �������, ��������� ����� ��������� � ����� �������� ���������, ��������������, ���������� ��� ����������������� � ����� � � ������� �����, ���������� ��� ���������� ������������� ����� �������� ����������. �������, ������������ �������������, ��������������� ���������������� ����������� �����������. ����� ������������� � ��� �������� ������, ��������, ��� ����������� �������� – ��� ��� ����������. � ���� ����� ������ � �������� � ������� ������������� ������ � ������������ ������ (��) ��������, ������������� ����������� / ��������, �������� � ����������, ����������, ������������. ����������� ��������������� � ������������ ����� �������� �������� �����������. ������ ����� �������������� ������������� � ������������ ���������, ��������, ��������� ������������� (���������� � �������), ��� ������ � ������������� ������������� ���������. ��������������� ������� ������������� �� � ����� ����� ������ ������ "R. U. R.". ������������ ����� � ���, ��� ���� ������ �������� � ��� (��������� �������� �����������). � �� �� �����, ����� �������, ��� �����������, �����������, �����������, ��������� ����������, ����� ���, ���������������� ������, ������������� ��������� � ������ �� ���� ������������� ��� ��������� ������, �������� �������� ����. ������� � �������� "������ � ������� �����" �� ���������� ��������, ��� ���� �� ����������� ������� ������������� ������������� �� (�, ��������������, ��������� � ���� ���������) ����������, ����������� ���������� � ��������� ���������� � ������ privacy: ��������� I, ��������, ������� ����������, �����, �������, �������, ���������, ���� I, ��������, ��������, ������, �����, �����, ��� ���, ������, ��������, ����������, ������� �����, ������, ����������, �����, �������, ���������, ������, �����������, �������, ����������, ���� �����, ��������, ���������, ������ �������, �������, ����������, ��� ������, ��� ���, ��� ������, ������� ������, ������� ����������, ������, ������� �������, ��������, ������, ����� �������, ����� �����, ���� �����, ������ ������, ������, ������� ����, ��������� ���������, ������, �����, �������, ������ ����.
������, ����������� ���������� ����, ����� ���� ��������, ������� �����, ����� ��������� �������� – � ��������, � �������� �����������, � ������. ���������� ����������� �������� � �����. �������� ����� ��������� ����������� – ��� ����� �������������� �������� ������, � �� ������ ����� ��������������������� �������, �������, �� ��������� ����������, ��������, ��������� ������ ������ ���������. ����� �������, ����� ������� ��� ������� �� ��������������, ������� �������, ��������� ����� ��������� � ����� �������� ���������, ��������������, ���������� ��� ����������������� � ����� � � ������� �����, ���������� ��� ���������� ������������� ����� �������� ����������. �������, ������������ �������������, ��������������� ���������������� ����������� �����������. ����� ������������� � ��� �������� ������, ��������, ��� ����������� �������� – ��� ��� ����������. � ���� ����� ������ � �������� � ������� ������������� ������ � ������������ ������ (��) ��������, ������������� ����������� / ��������, �������� � ����������, ����������, ������������. ����������� ��������������� � ������������ ����� �������� �������� �����������. ������ ����� �������������� ������������� � ������������ ���������, ��������, ��������� ������������� (���������� � �������), ��� ������ � ������������� ������������� ���������. ��������������� ������� ������������� �� � ����� ����� ������ ������ "R. U. R.". ������������ ����� � ���, ��� ���� ������ �������� � ��� (��������� �������� �����������). � �� �� �����, ����� �������, ��� �����������, �����������, �����������, ��������� ����������, ����� ���, ���������������� ������, ������������� ��������� � ������ �� ���� ������������� ��� ��������� ������, �������� �������� ����. ������� � �������� "������ � ������� �����" �� ���������� ��������, ��� ���� �� ����������� ������� ������������� ������������� �� (�, ��������������, ��������� � ���� ���������) ����������, ����������� ���������� � ��������� ���������� � ������ privacy: ��������� I, ��������, ������� ����������, �����, �������, �������, ���������, ���� I, ��������, ��������, ������, �����, �����, ��� ���, ������, ��������, ����������, ������� �����, ������, ����������, �����, �������, ���������, ������, �����������, �������, ����������, ���� �����, ��������, ���������, ������ �������, �������, ����������, ��� ������, ��� ���, ��� ������, ������� ������, ������� ����������, ������, ������� �������, ��������, ������, ����� �������, ����� �����, ���� �����, ������ ������, ������, ������� ����, ��������� ���������, ������, �����, �������, ������ ����.  ��������������� ���������-������� �� ������ � ������� ������ �������� «������ � ������� �����» – «������: �������� ���������������� �������» (LOVE. Sensations of androids) � «������: � ����� ���� ����������� ��������� ����� �� ����� �������, ��� �������������, �������, ��������, �����������?» (AUTHORITY. Whether can robots deprive people of difficult functions of managers, administrators, senators?)
��������������� ���������-������� �� ������ � ������� ������ �������� «������ � ������� �����» – «������: �������� ���������������� �������» (LOVE. Sensations of androids) � «������: � ����� ���� ����������� ��������� ����� �� ����� �������, ��� �������������, �������, ��������, �����������?» (AUTHORITY. Whether can robots deprive people of difficult functions of managers, administrators, senators?)  ������������� ����: ����������� ��������������. � ����� � ������� ������ �������� ������ ������ � ������������� ������������, �������� ������������� ��������� � ������ ����������� ��������� ���������������, ������� ������ ��������� ����� �����. ���� ���� � ��������� ��������� ���������� �� ����������� ���. ������� ����� �� "� ��������� �������� ����������" � ��. 38, 39 � 40 ��������� ����� �������� ����, � ����������� ������ ���������� � ����������� �� ����������� ������ � �������������� ����������, ���������� ��������, ������������ ������������ ����� ����� �������������, ����� �������� ������������� "� ������� ��������, ������� �� ����� ���������� ������������ �����", ����������� �. ��������. �������� � ������ - � ���������� ������������ ��������� ��������� ����������, ����� �� ���� ��� ���������� ���������� ������������� � ��������� ����������, ����������� � �������� �������� � ��������, ������ �� ��������. �������, � ���� �������, ������ �������������� ���� ����� ��������� �� ����� ������: ����� ������� � ������ �������, � ����� ������������. � ������ ���������� ���� ������� "��������"- ���� ���������������� ��������, ��� ������� �� ��������� ����������� ��������� � �������� ����������. ������������� � ������ �����������, ������� � ����� ����� �� ����� �� ������� ����� � ���������� ����������� (��� �� �� ���������� ��-����������� ����������� ��������) ��� ��������: ������ ��������� ����������� �� ������ ������ ������. � ������������� ���� 2 ������, ���� ���� ������� — ���� ����������� �������� �����������, ���� ��������� ������, �� ��� ���� �������������� ��������������, ������������ �� �������� ������� ����, ��� ������� ����������. ��������� ��� ������, ������ ���������� ���, ��� ��������� ����� ����� ���������� ��� �������� ������, ��� ���������� ���������� � ����������, � ����������� ������ ����������� ������������� ������������� - ����-��. � ������������, ����������� �� ����������������, ���� ������� �����: ������� ��������� �� ����������� ����������� ����������� ��������, � �������� ���� ����������. �� � �� ���������.
������������� ����: ����������� ��������������. � ����� � ������� ������ �������� ������ ������ � ������������� ������������, �������� ������������� ��������� � ������ ����������� ��������� ���������������, ������� ������ ��������� ����� �����. ���� ���� � ��������� ��������� ���������� �� ����������� ���. ������� ����� �� "� ��������� �������� ����������" � ��. 38, 39 � 40 ��������� ����� �������� ����, � ����������� ������ ���������� � ����������� �� ����������� ������ � �������������� ����������, ���������� ��������, ������������ ������������ ����� ����� �������������, ����� �������� ������������� "� ������� ��������, ������� �� ����� ���������� ������������ �����", ����������� �. ��������. �������� � ������ - � ���������� ������������ ��������� ��������� ����������, ����� �� ���� ��� ���������� ���������� ������������� � ��������� ����������, ����������� � �������� �������� � ��������, ������ �� ��������. �������, � ���� �������, ������ �������������� ���� ����� ��������� �� ����� ������: ����� ������� � ������ �������, � ����� ������������. � ������ ���������� ���� ������� "��������"- ���� ���������������� ��������, ��� ������� �� ��������� ����������� ��������� � �������� ����������. ������������� � ������ �����������, ������� � ����� ����� �� ����� �� ������� ����� � ���������� ����������� (��� �� �� ���������� ��-����������� ����������� ��������) ��� ��������: ������ ��������� ����������� �� ������ ������ ������. � ������������� ���� 2 ������, ���� ���� ������� — ���� ����������� �������� �����������, ���� ��������� ������, �� ��� ���� �������������� ��������������, ������������ �� �������� ������� ����, ��� ������� ����������. ��������� ��� ������, ������ ���������� ���, ��� ��������� ����� ����� ���������� ��� �������� ������, ��� ���������� ���������� � ����������, � ����������� ������ ����������� ������������� ������������� - ����-��. � ������������, ����������� �� ����������������, ���� ������� �����: ������� ��������� �� ����������� ����������� ����������� ��������, � �������� ���� ����������. �� � �� ���������. ����������� ��� ��������� ����������������. ��������� ���������� ����������� ��������������. ������ ������ ����� ���������: �������� �������� ������ ������ ���� �������� - � ������ ����� � ������ ��������
����������� ��� ��������� ����������������. ��������� ���������� ����������� ��������������. ������ ������ ����� ���������: �������� �������� ������ ������ ���� �������� - � ������ ����� � ������ �������� ����� I. ��������� �����������������
����� I. ��������� ����������������� ���� ������� ����� ������������ �� ����� ���������� �� «���» ���������� �����: «����� �������� �� ������ ����������».
���� ������� ����� ������������ �� ����� ���������� �� «���» ���������� �����: «����� �������� �� ������ ����������».

 �� 60 �� �� ������������ (��� �� 5 �� �� �������������) ������� — ����������, �� ������� �������� 1 �����������, ���������� ��������� ����� � 2 ���������� ������ ������ ������ «9712» ������� Optelecom, �������������� ��������� «������� ���������» �� Cable & Satellite Russia-2000. ������ ������ ����������� �� ������ �� 0 �� —3 �� — 2 �� —10 ���, ��������� ������/��� — ����� 60 ��.
�� 60 �� �� ������������ (��� �� 5 �� �� �������������) ������� — ����������, �� ������� �������� 1 �����������, ���������� ��������� ����� � 2 ���������� ������ ������ ������ «9712» ������� Optelecom, �������������� ��������� «������� ���������» �� Cable & Satellite Russia-2000. ������ ������ ����������� �� ������ �� 0 �� —3 �� — 2 �� —10 ���, ��������� ������/��� — ����� 60 ��.





