Конструкция машины создана на основе CAD-модели в пакете SolidWorks. Полученная модель позволила подобрать для опытного образца не только габаритные размеры, но и массу конструкции с учетом выбранного материала деталей, массу сервоприводов и дополнительной оснастки робота, а также рабочие зоны ног машины, С виртуальной модели была получена эскизная конструкторская документация для изготовления на станках с ЧПУ,
Конечности состоят из трех подвижных звеньев: плеча, бедра и голени. Питание осуществляется от аккумуляторной батареи напряжением 7,2 В. Для выполнения разводки платы было использовано приложение Proteus. Печатная плата изготовлена методом «лазерного утюга».
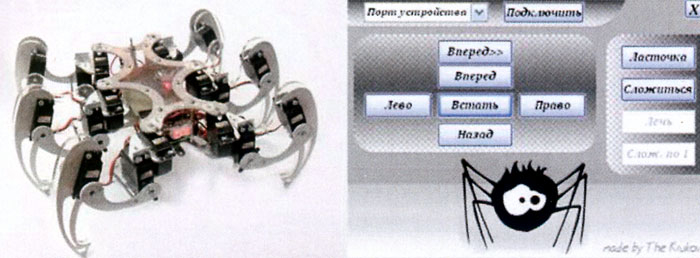
Механической часть шагающей машины выполнена на основе 18 сервоприводов с усилием 13 кг/см, . Система управления базируется на микроконтроллере серии AVR фирмы Atmel. Управление шагающей машиной осуществляется по беспроводному каналу связи Bluetooth. Управляющие команды подаются с персонального компьютера (ПК) посредством специально разработанного приложения HEXAPOD manager.
МОСКОВСКИЙ ГОСУДАРСТВЕННЫЙ ИНДУСТРИАЛЬНЫЙ УНИВЕРСИТЕТ, кафедра «АВТОМАТИКА, ИНФОРМАТИКА И СИСТЕМЫ УПРАВЛЕНИЯ»
Модель шагающего Nexapod для перемещения по пересеченной местности
В конструкции шагающего Nexapod шесть конечностей (6 точек соприкосновения) по три степени свободы в каждой. Механическая часть робота выполнена на основе 18 стандартных сервоприводов с усилием на валу 3,3 кг/см у двенадцати и 10 кг/ у шести.
Проектирование, детальная проработка и усовершенствование конструкции основывается на CAD модели, созданной в программной среде Solid Works, благодаря чему была рассчитана масса, проработана динамика перемещений, а также представлены чертежи каждой детали для изготовления на соответствующих станках с ЧПУ.
Специально для данной модели шагающего Нехароd была разработано программное обеспечение, позволяющее упростить задачу программирования движения робота. Это средство дает возможность визуально задать положение конечностей робота и просмотреть исполнение до записи массива чисел в энергонезависимую память микроконтроллера. Программное обеспечение позволяет также пошагово проверять конкретное положение робота, с помощью виртуальной 3D модели.
Связь ЭВМ с системой управления робота, осуществляется через порт RS232. Система управления базируется на микроконтроллере фирмы Atmel.
Визуальный подход к программированию перемещения для человека является очень наглядным и позволяет сконцентрировать внимание на алгоритме перемещения для конкретной поверхности. А также гибкая система программирования позволяет задавать любые траектории движения, что позволит роботу четко и устойчиво перемещаться на разных типах неровностей и для конкретных задач. По материалу ГОУ МГИУ
...например, что при ее установке щетка не будет вращаться. Причина такого порока может крыться в том, что ведущий шкив плохо сцепляется с резиновым ободом. Выступающую часть обода придется протереть спиртом и надежнее закрепить обод на корпусе щеткодержателя. При этом следует проверить, свободно ли ходит щеткодержатель на своей оси. Чтобы проделать всю эту работу, приставку, естественно, придется разобрать. Это несложно.
Отсоединив приставку от «Ореола», поверните ее на бок и отверните два винта, крепящие натирочную щетку к корпусу щеткодержателя. Затем отверните винт, фиксирующий корпус щеткодержателя, и снимите щеткодержатель вместе с подшипником и резиновым ободом. Отвернув с помощью плоскогубцев гибкий вадик от ведущего шкива, вытяните промежуточный и гибкий валики из направляющей трубы. После этого свинтите наконечник и отсоедините верхний гибкий валик от промежуточного, а затем, отвернув предварительно три винта на корпусе приставки, снимите ее кронштейн.
При сборке полотерной приставки не забудьте смазать вазелином (или любой густой смазкой) подшипники гибкого валика. Соберите приставку и проверьте качество произведенного вами ремонта. Журнал "Наука и жизнь" времён СССР
Сокращенный текст 3-го выпуска справочника "Кто есть кто в робототехнике" (фрагмент)
Электроагрегаты (в дальнейшем АД) предназначены для работы в качестве основного или резервного источника питания электрической энергией силовых и осветительных устройств. АД представляют собой агрегат, состоящий из дизельного двигателя и генератора, установленных на сварную раму и сочлененных между собой упругой муфтой с резиновыми пальцами. Элеюроагрегаты могут монтироваться нз раме, под капотом, в контейнере, на шасси, на автоприцепах, в кунге. Для электроагрегатов бескапотного исполнения климатическое исполнение У, категория размещения 2 по ГОСТ 15150. АД комплектуются современными генераторами серии БГ и щитами управления (на 1 и 2 степени автоматизации), что обеспечивает их качественные электрические характеристики. Система пуска АД электростартерная, напряжением 24 В. Агрегаты оборудованы устройствами для автоматического под заряда аккумуляторных батарей, а таюке счетчиком моточасов. Кроме того, агрегаты, по желанию заказчика, комплектуются дополнительным оборудованием: подогреватели топлива и масла, пульт дистанционного управления, устройство параллельной работы, глушители, топливный бак АД допускают перегрузку по мощности на 10% сверх номинальной (по току при номинальном коэффициенте мощности) в течение 1 часа. Суммарная наработка агрегата в режиме такой перегрузки не должна превышать 10 % назначенного ресурса до капитального ремонта двигателя. Агрегаты соответствуют: ТУ 3378-001-54111865-03. Агрегаты сертифицированы "Центром по сертификации элекроагрегатов и передвижных электростанций". По материалу "БАРАНЧИНСКИИ ЭЛЕКТРОМЕХАНИЧЕСКИЙ ЗАВОД"
Серия сообщений "Движители":ходовая часть,моторы
Часть 1 - Самоделки на колёсах и гусеницах
Часть 2 - Движители плавающих объектов.
...
Часть 7 - ВОЛНА ВМЕСТО КОЛЕСА
Часть 8 - ИЗГОТОВЛЕНИЕ ГУСЕНИЦЫ ДЛЯ МОТОНАРТ
Часть 9 - ШАГАЮЩАЯ МАШИНА ТИПА HEXAPOD
Часть 10 - Шариковая винтовая передача (ШВП)
Часть 11 - Линейные серводвигатели
...
Часть 26 - Сверхтяжелая робототехника – предмет первой необходимости
Часть 27 - Самодельные ветроэлектрогенераторы: какая нужна сила ветра?
Часть 28 - ЛЕТАЮ, ВИЖУ, СНИМАЮ: винтокрылые шпионы
Серия сообщений "Внедорожники и вездеходы":SUVs and ATVs
Часть 1 - За хакерскую атаку на беспилотный транспорт - 101 год тюрьмы?
Часть 2 - ШАГАЮЩАЯ МАШИНА ТИПА HEXAPOD
Часть 3 - Шнекоход «Буран»
Часть 4 - Мотонарты «Лайка-2»
...
Часть 27 - Засыпьте в бензобак водород
Часть 28 - Машины на основе высокотемпературных сверхпроводников
Часть 29 - Парковочное место и его юридический статус







