В качестве основного вооружения для танка «88» принята 120-мм гладкоствольная пушка, для которой разрабатываются оперенные кумулятивный и бронебойный подкалиберный снаряды с отделяющимся поддоном. На танке планируется установить усовершенствованную систему управления огнем. Ожидаемая масса танка 43 т, максимальная скорость 70 км/ч, запас хода 500 км. Первый опытный образец танка предполагается изготовить в текущем году.
Бронетранспортеров на вооружении сухопутных войск Японии насчитывается около 500. Бронетранспортер «60» имеет полностью закрытый бронированный корпус. Лобовая броня наклонная, а бортовая и кормовая — вертикальные. В средней части лобового листа установлена лебедка, а слева — шаровая опора для курсового пулемета калибра 7,62 мм. В передней части крыши корпуса размещена башенка механика-водителя, а справа от нее монтируется установка для 12,7-мм зенитного пулемета. Посадка и высадка десанта производится с кормы.
Силовое отделение расположено в передней части корпуса. На бронетранспортере установлен 8-цилиндровый дизель воздушного охлаждения. Ходовая часть с торсионной подвеской имеет по пять опорных и три поддерживающих катка на сторону. Ведущие колеса передние. Гусеничные ленты с металлическим шарниром. На базе БТР «60» созданы 81- и 107-мм самоходные минометы.
Плавающий бронетранспортер «73» скомпонован аналогично бронетранспортеру «60». Корпус выполнен из брони на основе алюминиевого сплава. Вместимость БТР «73» составляет 12 человек. Для посадки и высадки десанта в корме предусмотрена откидывающаяся аппарель. Пехотинцы могут вести огонь из бронетранспортера через амбразуры в задней части бортов корпуса (по. две на борт). Вооружение БТР — 7,62-мм и 12,7-мм пулеметы. В кормовой части корпуса расположены два спаренных гранатомета для постановки дымовых завес.
Подвеска бронетранспортера торсионная. Движение на плаву осуществляется за счет перематывания гусениц. Машина оснащена приборами ночного видения и ФВУ.
На базе. бронетранспортера «73» разработаны 105-мм самоходная гаубица «74» и система залпового огня «75».
С середины 70-х годов в стране ведутся работы по созданию колесных бронированных машин. В 1980 году создан первый образец командно-штабной бронемашины на колесном ходу. На машине установлен комплекс специального оборудования и аппаратуры связи. Вооружение — 12,7-мм пулемет. Максимальная скорость движения по шоссе — 100 км/ч. Сообщалось, что в случае успешных испытаний КШМ будет принята на вооружение уже в нынешнем году.
Второй вариант бронированной машины разрабатывается как БРМ. Сообщается, что машина будет вооружена 20-мм автоматической пушкой Rh202 западногерманского производства и 60-мм дымовыми гранатометами. Принятие БРМ на вооружение ожидается в 1985-1986 годах. В. ЧУКОВ, журнал "Техника и вооружение" времён СССР
Как по весу, так и по размерам, семейство этих роботов очень напоминает собак разных пород, сопровождающих хозяина и охраняющих его.
АВТОМАТИЧЕСКАЯ СИСТЕМА ЗАРЯЖАНИЯ ОРУДИЙ. Американские специалисты работают над проектом автоматической системы заряжания 203,2-мм гаубиц, в том числе и самоходных М110А2.
Основное звено системы — механический робот. Планируют, что он будет грузить выстрелы на машину, вести учет наличия боеприпасов по типам и номерам партий. По команде с пульта управления робот должен отыскать нужный выстрел в боеукладке, передать его на специальное устройство, где автоматически удаляется носовой колпачок снаряда и ввинчивается взрыватель. Затем выстрел подается к подъемнику орудия. Предполагают, что в состав автоматической системы заряжания войдут промышленный робот «Юнимейшен-4000», микро-ЭВМ дляуправления им, прицеп для транспортировки боеприпасов и другие устройства. По материалам советского журнала "Техника и вооружение"
 Робот-пылесос
Робот-пылесос
Армия США испытала тяжёлый робот-грузовик. Американская корпорация Oshkosh Truck построила тяжёлый внедорожный беспилотный автомобиль и испытала его в пустыне в рамках военной программы.
Новый грузовик, способный двигаться полностью самостоятельно (даже без дистанционного управления по радио) по пересечённой местности, обнаруживать препятствия и принимать решения — как лучше их миновать, и таким образом, доставлять груз в заданную точку, построен на базе десятиколёсного армейского автомобиля Oshkosh PLS. В ходе испытаний роботизированный PLS самостоятельно доставил свой груз через аризонскую пустыню на расстояние 11,2 километра.
Обычный PLS с водителем давно применяется американской армией по всему миру для транспортировки массивных контейнеров с ракетами, больших объёмов боеприпасов, воды и топлива. Грузоподъёмность этой машины составляет 16,5 тонн. У PLS-робота она осталась такой же.
Авторы автомобиля полагают, что его внедрение в войска позволит существенно сократить число солдат, задействованных в конвоях, а значит - уменьшить риск Потерь при атаках на такие колонны и высвободить живую силу под другие задачи. Журнал "Инфокиборг" № 9-10, 2006 год

ШАГАЮЩАЯ МАШИНА ТИПА HEXAPOD. Конструкция машины создана на основе CAD-модели в пакете SolidWorks. Полученная модель позволила подобрать для опытного образца не только габаритные размеры, но и массу конструкции с учетом выбранного материала деталей, массу сервоприводов и дополнительной оснастки робота, а также рабочие зоны ног машины, С виртуальной модели была получена эскизная конструкторская документация для изготовления на станках с ЧПУ,
Конечности состоят из трех подвижных звеньев: плеча, бедра и голени. Питание осуществляется от аккумуляторной батареи напряжением 7,2 В. Для выполнения разводки платы было использовано приложение Proteus. Печатная плата изготовлена методом «лазерного утюга».
Механической часть шагающей машины выполнена на основе 18 сервоприводов с усилием 13 кг/см, . Система управления базируется на микроконтроллере серии AVR фирмы Atmel. Управление шагающей машиной осуществляется по беспроводному каналу связи Bluetooth. Управляющие команды подаются с персонального компьютера (ПК) посредством специально разработанного приложения HEXAPOD manager. МОСКОВСКИЙ ГОСУДАРСТВЕННЫЙ ИНДУСТРИАЛЬНЫЙ УНИВЕРСИТЕТ, кафедра «АВТОМАТИКА, ИНФОРМАТИКА И СИСТЕМЫ УПРАВЛЕНИЯ»
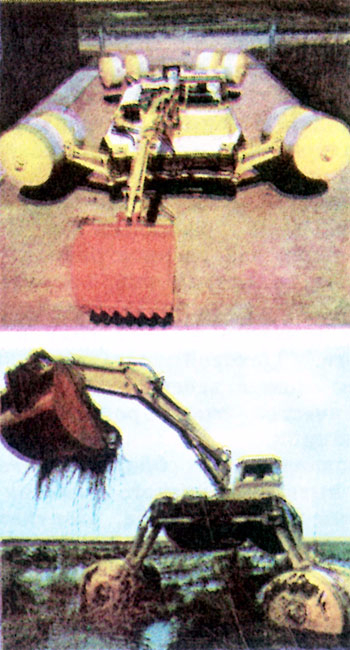
БОЛОТНЫЙ ВЕЗДЕХОД. Машина, изображенная на снимке, на первый взгляд напоминает фантастического пришельца ив космоса. Однако назначение ее вполне земное и прозаическое — осушение болот и прокладка трубопроводов в заболоченной местности.
Вездеход представляет собой небольшой гидравлический экскаватор, установленный на понтоне. Необычна система передвижения этой машины. Она состоит из двух пар шарнирных «ног» с полыми металлическими барабанами. «Ноги» передвигаются посредством гидроцилнндров и могут принимать любое положение. При движении по болоту они используются как весла, а сама машина скользит по поверхности на понтоне. По земле машина перекатывается на барабанах. Для передвижения по чистой воде на понтоне имеется гребной винт. По мнению специалистов, такая система обеспечивает агрегату 100-процентную проходимость. «Ноги» с барабанами используются также и во время работы экскаватора — они широко разводятся во все стороны от понтона для остойчивости. Все агрегаты машины работают от 3-цнлиндрового дизеля мощностью 44 л. с. Экскаватор-вездеход роет за час до 600 метров канала шириной и глубиной в один метр. Управляет им один человек (Голландия). По материалу журнала "Техника-молодёжи" времён СССР
На летней конференции ВВС США по наземным роботам демонстрировалось около десятка новых аппаратов.
Робот Wall Crawler размером 201 х 15 см умеет передвигаться под водой, взбираться по отвесным стенам домов и тайком заглядывать в окна. Шесть его колес прочно сцепляются с поверхностью благодаря тому, что в точках касания автоматически откачивается воздух.
Устройство ODIS пробирается под днищами расположенных на стоянках машин, проверяя, не установлены ли в укромных местах бомбы и другие опасные предметы.
Небольшой дистанционно управляемый танк ARTS способен на удалении до 7 км от оператора рыть или засыпать траншеи, а также заливать их водой.
Военным разведчикам предлагается машина RHex массой 15 кг, способная перемещаться по камням и сильно пересеченной местности. Закругленные лапы позволяют RHex двигаться способом, напоминающим тот, которым пользуются тараканы или перекати-поле. По материалу PC WEEK RE № 31 от 26 АВГУСТА, 2003 г.
Надо предвидеть, что будет создан робот-шагоход на коровьих копытах для нелегального пересечения контрольно-следовой полосы государственной границы с грузом контрабанды и нелегальных мигрантов.
Специалисты компании General Dynamics создают систему автоматической навигации для 18-тонного восьмиколесного военного грузовика Stryker. В рамках бюджета 185 млн. долл. им предстоит установить 60 действующих прототипов на различные автономные аппараты.
Вседорожник готовится для проекта FCS по развертыванию армии роботов: на первых порах он будет управляться человеком, но по мере роста "интеллекта" начнет самостоятельно выполнять миссии спасения и доставки грузов. Сейчас Stryker учится ежесекундно анализировать 120 кадров окружающей среды, поступающих через систему машинного зрения, устойчиво двигаться со скоростью 100 км/ч, а в случае опасности — прятаться за холмы или в листве. Масса установленного на машине бортового компьютерного оборудования достигла 20 кг. По материалу PC WEEK RE № 5 от 17 февраля 2004 г.
25.01.2013. На китайском луноходе «Нефритовый заяц» обнаружили неисправность
Китайские ученые начали тщательную проверку лунохода Юйту ("Нефритовый заяц") после того, как были выявлены неполадки в работе системы механического управления аппарата, передает в субботу агентство Синьхуа.
Китайский луноход на борту посадочного модуля «Чанъэ-3» сел в кратере Залив радуги 14 декабря. Он стал первым с 1976 года — после советской «Луны-24» — искусственным объектом, совершившим мягкую посадку на Луне. В задачи аппарата входит исследование геологической структуры и вещества на поверхности Луны. Планируется, что луноход будет работать три месяца.
Программа Китая по освоению космоса стартовала 8 октября 1956 года, когда в КНР была создана пятая академия Минобороны, занимавшаяся ракетными разработками. РИА Новости
Темы серии справочников «Компоненты и решения для создания роботов и робототехнических систем»
42E3F - чертежи гусеничных плавающих радиоуправляемых моделей. 85DFN - колесный комплекс: области применения. WI454R - шагающая / гусеничная /. колёсная система передвижения роботов. схема CE685 - системы управления движением колесных роботов: типы. CJ8492 - модели танков на пульте управления второй мировой войны из золота. SER920 - транкинговый модуль автомобиля: принципиальная схема. U392 - методы управления мобильных роботов. QWF551 - подшипник привода трансмиссии. SRW904 - микромотор-редуктор. DJW95 -инструмент для робототехнического комплекса. C39RC - чемодан на колесиках: бортовой комплекс управления. HRT5D - прототип коляски трехколесной. NE5345D - геометрия построения механизма шасси. JRT64RF - настройка чувствительности редуктора. NERTR55 - язык программирования для создания роботов. CFERTT84 - устройство и использование передвижных роботов. CDFTYT69 - пошаговое построение модели управления роботом в simulink. I456ET - управление роботом с помощью индуктивного джойстика. NR5YE - планарный двигатель. VCUFG5 - применение разных типов военных антенн в различных условиях. HOU0987 - гусеничная прожекторная установка. LDYT8R - герметизация радиоуправляемой машины. KE9Y6E - развитие российского рынка радиоуправляемых товаров. BXIG365R - мехатронные модули пространственного движения. DUR8R - модули для фар миллиметрового диапазона. GYYU8R - чертежи для изготовления гоночного картинга.
Поможет в обучении мобильного робота геолога / топографа:
Топографические наблюдения. На отдельные объекты маршрута, например, участок археологических раскопок, минеральный источник, волок между двумя речными системами и т. п., надо составлять подробные планы. Их делают с помощью провешивания прямых линий вехами, измерения расстояний мерной лентой, построения эккером (легкий несложный прибор для определения взаимно перпендикулярных линий) на местности прямых углов. При съемке ведется абрис — глазомерный чертеж, на котором показывают снимаемые предметы и записывают числовые результаты измерений. Затем по этим зарисовкам и записям в масштабе составляют план снятого участка.
При топографических наблюдениях часто возникает нужда в определении относительных высот точек местности и составлении профиля по определенному направлению. На небольших участках профиль можно составить с помощью ватерпаса (так называемое горизонтальное визирование) или эклиметра — прибора для измерения углов наклона местности. Более удобно определение высот с помощью барометра-высотомера.
Геологические наблюдения в условиях путешествия носят, как правило, характер маршрутной геологической съемки. В ходе их туристы знакомятся с породами, слагающими земную кору, полезными ископаемыми и окаменевшими остатками далекого прошлого, с работой воды, льда и ветра. Геологические наблюдения рекомендуется вести за обнажениями, выходами горных -пород (скалами), камнями, высыпками из нор животных, обломками в корневищах вывороченных деревьев и т. п. Турист может собрать в походе минералы, сделать зарисовки пластов и жил, сфотографировать наиболее интересные геологические объекты.
При описании обнажения следует точно указать его место, отметить его длину, высоту, сделать схематическую зарисовку, отметить цвет, структуру обнажения, перечислить, каких минералов встречается больше, взять образцы породы каждого вида.
Образцы следует брать из коренных пород с крутых склонов, гребней и вершин, откалывая от выхода этих пород (а не от осыпей). Места находок и обнажений надо 'описать в дневнике и нанести на карту. К каждому образцу, должна быть приложена этикетка с указанием пункта, где он взят.
Для проведения геологических наблюдений необходимо следующее снаряжение: геологический молоток, зубило, мерная лента (бечевка), горный компас (с эклиметром), флакон с 10%-ной соляной кислотой (для определения горных пород на вскипание), матерчатые мешочки.
Изучение рельефа. Геоморфологические наблюдения во время путешествия позволяют получить описание отдельных участков рельефа на маршруте — долин, холмов, водоразделов. Туристам проще всего проводить подобные наблюдения по программам, содержащим примерно следующие вопросы.
1. Название объекта.
2. Преобладающее направление его.
3. Длина и высота над уровнем моря.
4. Характеристика поперечного профиля (ширина, форма сечения, количество речных террас, характер поймы реки, наличие морен и т. п.)..
5. Характеристика продольного профиля.
6. Типы покрывающей растительности на отдельных участках.
7. Хозяйственное использование территории.
Так, при описании склонов надо отмечать их положение (склон правого или левого берега реки), экспозицию, крутизну, геологическое строение, форму поперечного сечения, а также степень изрезанности.
Составляя описание водораздельного гребня или водораздельного плато, .следует отмечать направление гребня (плато) относительно стран света, характер его расчленения, наличие перевалов, геологическое строение гребня (плато), наличие остатков древних поверхностей. Намечая наблюдения над рельефом, туристы должны заранее составить представление о его особенностях в районе путешествия, сделать по возможности крупномасштабную выкопировку из карт и схем и запастись тем же снаряжением, что и для топографических наблюдений. «Карманный справочник туриста», автор-составитель - Ю. А. Штюрмер
ЛИТЕРАТУРА
Микроконтроллеры для встраиваемых приложений. Содержит информацию об архитектуре, алгоритмах работы и основных технических характеристиках микроконтроллеров семейств НС05 и НС08, выпускаемых фирмой Motorola. Специальная глава посвящена описанию средств разработки встраиваемых микропроцессорных систем на МК вышеуказанных семейств.
Микроконтроллеры семейства SX фирмы SCENIX. Справочное пособие по микроконтроллерам серии SX фирмы Ubicom (ранее Scenix). Микроконтроллеры данного семейства являются самыми быстродействующими 8-разрядными микроконтроллерами общего назначения в мире (до 100 MIPS). В книге содержится вся информация, необходимая для изучения и дальнейшего использования микроконтроллеров: описание архитектуры, синхронизации, режимов работы, программирование портов ввода/вывода, компаратора, таймеров и прерываний. Рассмотрены средства разработки, необходимые для использования микроконтроллеров SX.
Микроконтроллеры семейства Z86 фирмы ZILOG. Рассмотрены вопросы архитектурного построения и программирования КМОП-микроконтроллеров семейства Z86 производства корпорации Zilog. Приведены примеры проектирования устройств передачи и обработки информации на базе микроконтроллеров семейства Z86.
Микроконтроллеры фирмы «Филипс» семейства х51. В первом томе риведен обзор выпускаемых фирмой «Филипс» микроконтроллеров. Дана также информация по доступным отечественному пользователю микроконтроллерам семейства х51, изготавливаемым другими ведущими мировыми производителями. Приведены самая свежая на момент выпуска книги сводная таблица по всем выпускаемым «Филипс» микроконтроллерам, а также терминологический словарь. Далее подробно рассматриваются особенности классических микроконтроллеров семейства х51: система команд (подробно описаны все команды микроконтроллеров с кодами операций, операндами, примерами действия команд, временем их исполнения) и аппаратные особенности (структура памяти и регистров, арифметическо-логическое устройство, таймеры-счетчики и режимы их работы, система прерываний, стандартный последовательный порт со всеми режимами работы, и система управления питанием). Подробно описаны микроконтроллеры с разработанным фирмой «Филипс» оригинальным ядром 80С51+, в том числе: микроконтроллеры с флэш-памятью программ, микроконтроллеры с программируемой матрицей счетчиков, микроконтроллеры с расширенной памятью программ и данных. Рассмотрены также микроконтроллеры с дополнительными портами ввода/вывода, с аппаратно реализованной шиной I2C и с встроенным аналого-цифровым преобразователем.
Микроконтроллеры Microchip®. Практическое руководство. Приведена справочная информация по микроконтроллерам Microchip®. Подробно описано начало работы с микроконтроллерами компании Microchip на примере микроконтроллера PIC16F84. Даны практические схемы и описания программатора, интегрированной среды разработчика MPLAB-IDE, примеры простейших программ, подборка практических примеров устройств на основе микроконтроллеров PIC. Рассмотрены принципиальные схемы и исходные тексты программ, тексты часто применяемых подпрограмм, таких как конвертация чисел, работа с шиной I2С.
Перспективные изделия. Обзоры по современным ВЧ-ферритовым сердечникам, светодиодам фирмы Kingbright и элементам силовой электроники фирмы Siemens. Описываются новые типы энергонезависимых сегнетоэлектрических запоминающих устройств, мощных DC/DC-преобразователей для питания микропроцессоров и оригинальные однокристальные устройства записи/воспроизведения звука фирмы ISD.
Продукция фирмы ELANTEC. Обзор аналоговых и цифроаналоговых микросхем фирмы Elantec. Фирма Elantec выпускает быстродействующие аналоговые микросхемы для видеотехники, мультимедиа, оборудования связи, измерительной техники и систем обработки данных. В обзоре представлены микросхемы операционных усилителей, компараторов, DC/DC- и AC/DC-преобразователи, микросхемы для зарядных устройств, супервизоры напряжения со схемой сброса, таймеры, микросхемы АЦП и ЦАП, а также микросхемы для офисной техники. В издании рассматриваются параметры выпускаемых фирмой Elantec микросхем, их цоколевка, структурные схемы и особенности применения.
Микросхемы для управления электродвигателями. Представлены микросхемы, используемые для управления электродвигателями в бытовой технике, электронных приборах, промышленном оборудовании и в транспорте. Описаны изделия фирм Allegro, Hitachi, Mitsubishi, NEC, Sony, Panasonic, Philips, Rohm, Samsung, Sanken, Sanyo, SGS-Thomson, Sharp, Siliconix, Siemens, Toshiba, Temic, Unitrode. Даны сведения об отечественных заменах и аналогах.
Микросхемы для управления электродвигателями. Описаны более 300 микросхем, применяемых для управления электродвигателями в аудио- и видеомагнитофонах, телекамерах, проигрывателях компакт-дисков, дисководах персональных компьютеров, принтерах и вентиляторах. Описаны изделия фирм Allegro, Cherry, Fairchild, Micro Linear, National Semiconductor, Philips Semiconductor, Rohm, Samsung, Sanken, Sanyo, ST Microelectronics (SGS-Thomson), Teledyne, Telcom, Temic, Texas Instruments, Toshiba. На каждую микросхему приводится структурная схема, совмещенная со схемой применения, кратко излагаются назначение выводов и особенности.
Зарубежные микросхемы для управления силовым оборудованием. Приводятся структурные схемы, назначения выводов и особенности зарубежных микросхем для управления исполнительными механизмами и оборудованием. Приведены данные более чем 500 микросхем, используемых для управления реле, лампами накаливания, светодиодами, люминесцентными лампами, нагревателями и другими потребителями. Описаны изделия фирм Allegro, Elantec, Fairchild, Harris (Intersil), International Rectifier, Linear Technology, Maxim, Motorola, National Semiconductor, Philips Semiconductor, Power Integrations, Samsung, ST Microelectronics (SGS-Thomson, Thomson-CSF), Temic (Telefunken, Siliconix), Texas Instruments (Unitrode).
Современные микроконтроллеры и микропроцессоры Motorola: Справочник. Книга знакомит с архитектурой, функционированием и областями применения большой номенклатуры современных микроконтроллеров и микропроцессоров, выпускаемых компанией Motorola (с апреля 2004 г. выпуск этих изделий производится компанией Freescale Semiconductor). В книге рассмотрены восьмиразрядные микроконтроллеры семейств 68НС05, 68НС08, 68НС11; шестнадцатиразрядные микроконтроллеры семейств 68НС12, 68НС16; тридцатидвухразрядные микроконтроллеры и микропроцессоры семейств 683хх, 680x0; тридцатидвухразрядные RISC- микропроцессоры и RISC-микроконтроллеры семейств PowerPC (МРСбОх, МРС7хх, МРС5хх) и ColdFire (MCFSxxx); коммуникационные контроллеры МС68360, МС8302, МРС860, МРС823, МРС8260, широко используемые в современных системах телекоммуникации. Дан обзор программных и аппаратных средств для проектирования, программирования и отладки систем на базе микропроцессоров и микроконтроллеров фирмы Motorola.
Цифровые устройства и микропроцессорные системы. Принципы построения и функционирования интегральных логических элементов, методы синтеза логических устройств комбинационного и последовательного типов, различных узлов цифровых устройств, микропрограммных автоматов на основе схемной и программируемой логики, а также методы контроля цифровых устройств. Рассматриваются микропроцессоры серий 580, 1813, 1816, 1830, их программирование и вопросы построения микропроцессорных систем.
AVR-RISC микроконтроллеры. Дано описание базовой серии микроконтроллеров семейства AVR от компании Atmel, построенных на базе прогрессивной архитектуры RISC с применением программируемой флэш-памяти EPROM. Кроме того, подробно рассматривается программирование микроконтроллеров данной серии на языке ассемблера, а также среда отладки AVR-Studio и программно-аппаратный набор STK200.
Измерение, управление и регулирование с помощью AVR-микроконтроллеров. Книга описывает особенности применения AVR-микроконтроллеров в технике измерения, управления и регулирования. При этом основной акцент поставлен на измерении напряжения, выводе и отображении результатов измерений, а также на регулировании аналоговых напряжений. Изложенный материал дает возможность поэтапно проследить весь процесс разработки устройства, понять, почему программное и аппаратное обеспечение скомпоновано именно таким, а не каким-либо д
Серия сообщений "Беспилотные автомобили / электромобили":Unmanned vehicles / electric vehicles
Часть 1 - БЕСПИЛОТНЫЕ АВТОМОБИЛИ - ОТВЛЕКАЮЩИЙ МАНЕВР СТОРОННИКОВ "ЧЕРНЫХ ЯЩИКОВ"?
Часть 2 - Как занять своё место в индустрии беспилотных электромобилей?
Часть 3 - СЕЛЬСКОХОЗЯЙСТВЕННЫЕ ЭЛЕКТРОМОБИЛИ
Часть 4 - За хакерскую атаку на беспилотный транспорт - 101 год тюрьмы?
...
Часть 34 - Электромобили: оптимальнее, если они беспилотные
Часть 35 - Поддержат ли человекоподобные роботы-компаньоны людей с инвалидностью? Часть 8-я
Часть 36 - Поддержат ли человекоподобные роботы-компаньоны людей с инвалидностью? Часть 24-я
Метки:
беспилотный КАМАЗ
беспилотное такси
беспилотник
беспилотный автомобиль
беспилотные автомобили
электромобили
-
Запись понравилась
-
0
Процитировали
-
0
Сохранили
-


 Подвижный робототехнический комплекс для ликвидации последствий радиационных аварий (КПР). Оборудование и аппаратура комплекса позволяет проводить визуальную и радиационную разведку и гамма-поиск, отбор проб и транспортирование твердых радиоактивных материалов. Комплекс является дистанционно-управляемым робототехническим (электромеханическим) устройством, в состав которого входят: два мобильных робота типа МРК-46, оснащенныстепенным манипулятором и фронтальным погрузчиком; бортовая система управления; система энергообеспечения; телевизионная система; пост дистанционного управления; канал связи; дополнительное оборудование (пробоотборники грунта и жидкости, отбойный молоток, перфоратор, вилы грузовые, углошлифовальная машина и другое). В конструкции манипулятора, фронтального погрузчика и транспортного средства используются электромеханические приводы с пропорциональным управлением. Управление роботом - дистанционное с помощью телевизионных камер с переносного пульта управления. Размещается комплекс на средстве доставки - автомобиле КамАЗ 4310 с прицепом. Особенности: автономное выполнение работ по ликвидации последствий техногенных катастроф в условиях радиационного и химического заражения; проведение радиационной и химической разведки, взятие проб грунта и воды как с использованием мобильных роботов, так и с помощью приборов входящих в состав комплекса (ВПХР, ИМД-21 и другие); высокоманевренное гусеничное транспортное средство с большим диапазоном регулирования по скорости, что позволяет точно позиционировать мобильный робот на местности; выполнение разнообразных операций с возможностью одновременного использования манипулятора, фронтального погрузчика и транспортного средства в широком диапазоне нагрузок при пропорциональном управлении; большой набор дополнительного оборудования и сменного инструмента; возможность установки на мобильный робот дополнительного оборудования (приборы, датчики и т.п.), аварийно-спасательного и технологического инструмента для расширения круга решаемых задач; наличие средств защиты экипажа; возможность проведения дезактивации. Технические характеристики: максимальная скорость передвижения, м/с - 0,5; высота преодолеваемого порогового препятствия, мм - 200; грузоподъемность манипулятора, кг - 100; грузоподъемность фронтального погрузчика, кг - 130; наибольший радиус действия, м - 200 (по штатному кабелю), 400 (с кабелем-вставкой), 3000 (по радиоканалу); длительность непрерывной работы, не менее, ч - 8; габаритные размеры, м - 2,5 х 1,2 х 1,8; масса в снаряженном состоянии, кг - 650; потребление энергии, кВт, не более - 3.
Подвижный робототехнический комплекс для ликвидации последствий радиационных аварий (КПР). Оборудование и аппаратура комплекса позволяет проводить визуальную и радиационную разведку и гамма-поиск, отбор проб и транспортирование твердых радиоактивных материалов. Комплекс является дистанционно-управляемым робототехническим (электромеханическим) устройством, в состав которого входят: два мобильных робота типа МРК-46, оснащенныстепенным манипулятором и фронтальным погрузчиком; бортовая система управления; система энергообеспечения; телевизионная система; пост дистанционного управления; канал связи; дополнительное оборудование (пробоотборники грунта и жидкости, отбойный молоток, перфоратор, вилы грузовые, углошлифовальная машина и другое). В конструкции манипулятора, фронтального погрузчика и транспортного средства используются электромеханические приводы с пропорциональным управлением. Управление роботом - дистанционное с помощью телевизионных камер с переносного пульта управления. Размещается комплекс на средстве доставки - автомобиле КамАЗ 4310 с прицепом. Особенности: автономное выполнение работ по ликвидации последствий техногенных катастроф в условиях радиационного и химического заражения; проведение радиационной и химической разведки, взятие проб грунта и воды как с использованием мобильных роботов, так и с помощью приборов входящих в состав комплекса (ВПХР, ИМД-21 и другие); высокоманевренное гусеничное транспортное средство с большим диапазоном регулирования по скорости, что позволяет точно позиционировать мобильный робот на местности; выполнение разнообразных операций с возможностью одновременного использования манипулятора, фронтального погрузчика и транспортного средства в широком диапазоне нагрузок при пропорциональном управлении; большой набор дополнительного оборудования и сменного инструмента; возможность установки на мобильный робот дополнительного оборудования (приборы, датчики и т.п.), аварийно-спасательного и технологического инструмента для расширения круга решаемых задач; наличие средств защиты экипажа; возможность проведения дезактивации. Технические характеристики: максимальная скорость передвижения, м/с - 0,5; высота преодолеваемого порогового препятствия, мм - 200; грузоподъемность манипулятора, кг - 100; грузоподъемность фронтального погрузчика, кг - 130; наибольший радиус действия, м - 200 (по штатному кабелю), 400 (с кабелем-вставкой), 3000 (по радиоканалу); длительность непрерывной работы, не менее, ч - 8; габаритные размеры, м - 2,5 х 1,2 х 1,8; масса в снаряженном состоянии, кг - 650; потребление энергии, кВт, не более - 3. Многоцелевой мобильный робототехнический комплекс МРК-26. МРК-26 предназначен для погрузочно-разгрузочных работ, транспортирования предметов в мягких и жестких оболочках, обезвреживания предметов, подозреваемых на взрывное устройство (ВУ), их разрушение при помощи гидроразрушителя на открытых площадках, в помещениях ограниченного объема. Состав комплекса: четырех гусеничное шасси; манипулятор (5 степеней подвижности); электромеханическая трансмиссия; система управления; пост оператора; канал связи; цветные телекамеры; система освещения; комплект сменного инструмента.
Многоцелевой мобильный робототехнический комплекс МРК-26. МРК-26 предназначен для погрузочно-разгрузочных работ, транспортирования предметов в мягких и жестких оболочках, обезвреживания предметов, подозреваемых на взрывное устройство (ВУ), их разрушение при помощи гидроразрушителя на открытых площадках, в помещениях ограниченного объема. Состав комплекса: четырех гусеничное шасси; манипулятор (5 степеней подвижности); электромеханическая трансмиссия; система управления; пост оператора; канал связи; цветные телекамеры; система освещения; комплект сменного инструмента.  Многоцелевой робототехнический комплекс МРК-27. МРК-27 предназначен для замены человека при выполнении работ в экстремальных условиях. Состоит из мобильного робота, оснащенного манипулятором, и поста дистанционного управления. Особенности комплекса: относительно малые габариты и масса обеспечивают высокую мобильность комплекса за счет возможности доставки к месту выполнения работ легковым автомобилем или микроавтобусом; гусеничное шасси обеспечивает высокую проходимость и маневренность робота, в том числе, движение по лестнице; управление по кабелю или по радио позволяет выбирать способ связи посту управления с мобильным роботом в зависимости от условий работы; пропорциональное управление шасси и манипулятором обеспечивает необходимую точность выполнения операций; возможность установки до 8 цветных телекамер с подсветкой позволяет получить максимум информации о рабочей зоне в любых условиях освещенности; высокая грузоподъемность манипулятора дает возможность работать с предметами массой до 40 кг во всей зоне обслуживания; омываемое исполнение шасси допускает возможность дегазации и дезактивации после работы в зараженных зонах; простая конструкция агрегатов и модулей позволяет легко адаптировать образец под требования заказчика.
Многоцелевой робототехнический комплекс МРК-27. МРК-27 предназначен для замены человека при выполнении работ в экстремальных условиях. Состоит из мобильного робота, оснащенного манипулятором, и поста дистанционного управления. Особенности комплекса: относительно малые габариты и масса обеспечивают высокую мобильность комплекса за счет возможности доставки к месту выполнения работ легковым автомобилем или микроавтобусом; гусеничное шасси обеспечивает высокую проходимость и маневренность робота, в том числе, движение по лестнице; управление по кабелю или по радио позволяет выбирать способ связи посту управления с мобильным роботом в зависимости от условий работы; пропорциональное управление шасси и манипулятором обеспечивает необходимую точность выполнения операций; возможность установки до 8 цветных телекамер с подсветкой позволяет получить максимум информации о рабочей зоне в любых условиях освещенности; высокая грузоподъемность манипулятора дает возможность работать с предметами массой до 40 кг во всей зоне обслуживания; омываемое исполнение шасси допускает возможность дегазации и дезактивации после работы в зараженных зонах; простая конструкция агрегатов и модулей позволяет легко адаптировать образец под требования заказчика.  Мобильный робототехнический комплекс МРК-61. Предназначен для выполнения работ по ликвидации последствий аварий на объектах в условиях опасных для жизни человека. Применяется на местности с бетонным, асфальтовым покрытием и плотных грунтовых площадках, неровностями высотой до 100 мм, и уклоном до 10%. Состоит из мобильного робота, оснащенного манипулятором, переносного пульта оператора, подъемника телекамеры, погрузчика фронтального и кабелеукладчика. Комплекс обладает характерными особенностями: имеющийся погрузчик фронтальный осуществляет транспортирование (перемещение) зараженного грунта, предметов и выполнение погрузочно-разгрузочных работ; наличие телекамер позволяет вести визуальную разведку местности и предметов; возможно ведение радиационной разведки укладка радиоактивных предметов в спецконтейнер, а также взятие проб жидкостей и грунта; с помощью дополнительного оборудования возможно проводить резку металлических прутьев и осуществлять различные виды работ отбойным молотком. Технические характеристики: длина, м - 2,55; ширина, м - 1,15; высота, м - 1,45; масса, кг - 800; скорость передвижения, км/час - 4,5; преодолеваемый подъем, град - 20; управление: по кабелю, м - 200; видеосистема: три цветных телекамеры с постоянным фокусом; манипулятор: 5 степеней подвижности; грузоподъемность, кг - 100;
Мобильный робототехнический комплекс МРК-61. Предназначен для выполнения работ по ликвидации последствий аварий на объектах в условиях опасных для жизни человека. Применяется на местности с бетонным, асфальтовым покрытием и плотных грунтовых площадках, неровностями высотой до 100 мм, и уклоном до 10%. Состоит из мобильного робота, оснащенного манипулятором, переносного пульта оператора, подъемника телекамеры, погрузчика фронтального и кабелеукладчика. Комплекс обладает характерными особенностями: имеющийся погрузчик фронтальный осуществляет транспортирование (перемещение) зараженного грунта, предметов и выполнение погрузочно-разгрузочных работ; наличие телекамер позволяет вести визуальную разведку местности и предметов; возможно ведение радиационной разведки укладка радиоактивных предметов в спецконтейнер, а также взятие проб жидкостей и грунта; с помощью дополнительного оборудования возможно проводить резку металлических прутьев и осуществлять различные виды работ отбойным молотком. Технические характеристики: длина, м - 2,55; ширина, м - 1,15; высота, м - 1,45; масса, кг - 800; скорость передвижения, км/час - 4,5; преодолеваемый подъем, град - 20; управление: по кабелю, м - 200; видеосистема: три цветных телекамеры с постоянным фокусом; манипулятор: 5 степеней подвижности; грузоподъемность, кг - 100; Мобильный робототехнический комплекс МРК-УТК. Предназначен для проведения локальной визуальной и радиационной разведки и гамма-поиска, а также для подготовки и тренировки личного состава подразделений, участвующих в антитеррористических операциях, при ликвидации последствий чрезвычайных ситуаций (при выполнении работ в условиях химического и радиационного заражения, при работе с взрывоопасными предметами) и в других условиях, опасных для жизни и здоровья человека. С дополнительным специальным навесным оборудованием (приборы радиационной и химической разведки, разрушители, контейнеры-локализаторы и другое) комплекс позволяет осуществлять разведывательные операции при ликвидации техногенных катастроф. Подготовка личного состава на комплексе включает изучение устройства комплекса, отработку методик ведения радиационной и химической разведки, получение навыков управления движением мобильного робота, получение навыков работы с манипулятором и дополнительным оборудованием. Комплекс является дистанционно-управляемым робототехническим (электромеханическим) устройством, в состав которого входят: гусеничное транспортное средство с возможностью изменения геометрии ходовой части; манипулятор с четырьмя или пятью степенями подвижности; бортовая система управления; система энергообеспечения; телевизионная система; пульт управления; комплект антенн со штативом; дополнительное оборудование. Для тушения локальных очагов возгорания, проведения дезактивации и т.п. работ комплекс может быть оснащен гидромонитором. В конструкции манипулятора и транспортного средства используются электромеханические приводы с пропорциональным управлением. Управление роботом - дистанционное с помощью телевизионных камер с переносного пульта управления. Наблюдение за ходом работ ведется с использованием дополнительной выносной системы видеонаблюдения.
Мобильный робототехнический комплекс МРК-УТК. Предназначен для проведения локальной визуальной и радиационной разведки и гамма-поиска, а также для подготовки и тренировки личного состава подразделений, участвующих в антитеррористических операциях, при ликвидации последствий чрезвычайных ситуаций (при выполнении работ в условиях химического и радиационного заражения, при работе с взрывоопасными предметами) и в других условиях, опасных для жизни и здоровья человека. С дополнительным специальным навесным оборудованием (приборы радиационной и химической разведки, разрушители, контейнеры-локализаторы и другое) комплекс позволяет осуществлять разведывательные операции при ликвидации техногенных катастроф. Подготовка личного состава на комплексе включает изучение устройства комплекса, отработку методик ведения радиационной и химической разведки, получение навыков управления движением мобильного робота, получение навыков работы с манипулятором и дополнительным оборудованием. Комплекс является дистанционно-управляемым робототехническим (электромеханическим) устройством, в состав которого входят: гусеничное транспортное средство с возможностью изменения геометрии ходовой части; манипулятор с четырьмя или пятью степенями подвижности; бортовая система управления; система энергообеспечения; телевизионная система; пульт управления; комплект антенн со штативом; дополнительное оборудование. Для тушения локальных очагов возгорания, проведения дезактивации и т.п. работ комплекс может быть оснащен гидромонитором. В конструкции манипулятора и транспортного средства используются электромеханические приводы с пропорциональным управлением. Управление роботом - дистанционное с помощью телевизионных камер с переносного пульта управления. Наблюдение за ходом работ ведется с использованием дополнительной выносной системы видеонаблюдения.
 Робот «Разведчик» с дистанционно-управляемой системой "Гамма-локатор З" (ДУС ГЛ-3). ДУС ГЛ-3 - автономное радиоуправляемое средство, предназначенное для автоматического поиска источников гамма-излучения и определения их изотопного состава. Режимы обследования: измерение в заданной точке, сканирование участка, сканирование в окне и сканирование обозначенной зоны. Результаты измерений сохраняются в базе данных персонального компьютера поста управления. ДУС ГЛ-3 состоит из поста управления, линии радиосвязи и исполнительного устройства, устанавливаемого на подвижной робот. Технические характеристики ДУС ГЛ-3: идентифицированные изотопы: Аm-241, Сs-137, Со-60; диапазон измерения активности с 1м - 0,5 мкКи - 1Ки; расстояние между детектором и измеряемой точкой, м - 0,5-100; диапазон энергии гамма квантов, МэВ - 0,05-3,0; питание, В - 12; габариты, мм - 304 х 456 х 416. Технические характеристики подвижного аппарата робота «Разведчик»: шасси – гусеничное; габариты (длина х ширина х высота), мм - 1400 х 780 х 600; масса, кг - 250; грузоподъемность, кг: шасси - 70; манипулятора - 6; количество степеней подвижности манипулятора - 5; скорость перемещения, м/с - 0,05-1,5; автономная работа от аккумуляторных батарей, час – 6. Преодолеваемые препятствия: дверные проёмы; эскарпы и контрэскарпы высотой, мм - 250; лестничные пролеты, траншеи шириной, мм - 450; уклон, градусов - 30. Управление по радиоканалу, интерфейс обмена RS232. Условия эксплуатации: температура, град. С - от -30 до 40; мощность экспозиционной дозы γ-излучения, Р/ч - 104; интегральная экспозиционная доза γ-излучения, Р - 105.
Робот «Разведчик» с дистанционно-управляемой системой "Гамма-локатор З" (ДУС ГЛ-3). ДУС ГЛ-3 - автономное радиоуправляемое средство, предназначенное для автоматического поиска источников гамма-излучения и определения их изотопного состава. Режимы обследования: измерение в заданной точке, сканирование участка, сканирование в окне и сканирование обозначенной зоны. Результаты измерений сохраняются в базе данных персонального компьютера поста управления. ДУС ГЛ-3 состоит из поста управления, линии радиосвязи и исполнительного устройства, устанавливаемого на подвижной робот. Технические характеристики ДУС ГЛ-3: идентифицированные изотопы: Аm-241, Сs-137, Со-60; диапазон измерения активности с 1м - 0,5 мкКи - 1Ки; расстояние между детектором и измеряемой точкой, м - 0,5-100; диапазон энергии гамма квантов, МэВ - 0,05-3,0; питание, В - 12; габариты, мм - 304 х 456 х 416. Технические характеристики подвижного аппарата робота «Разведчик»: шасси – гусеничное; габариты (длина х ширина х высота), мм - 1400 х 780 х 600; масса, кг - 250; грузоподъемность, кг: шасси - 70; манипулятора - 6; количество степеней подвижности манипулятора - 5; скорость перемещения, м/с - 0,05-1,5; автономная работа от аккумуляторных батарей, час – 6. Преодолеваемые препятствия: дверные проёмы; эскарпы и контрэскарпы высотой, мм - 250; лестничные пролеты, траншеи шириной, мм - 450; уклон, градусов - 30. Управление по радиоканалу, интерфейс обмена RS232. Условия эксплуатации: температура, град. С - от -30 до 40; мощность экспозиционной дозы γ-излучения, Р/ч - 104; интегральная экспозиционная доза γ-излучения, Р - 105. РТК 100
РТК 100 РТК 200
РТК 200 Робот-пожарный
Робот-пожарный Робот-сапёр. МРК "Сапер" предназначен для проведения разведки, контроля и идентификации взрывчатых веществ (ВВ), взрывчатых устройств (ВУ) и радиоактивного заражения, разминирования или уничтожения ВВ и ВУ во внутренних объемах различных транспортных средств, а также в ограниченных промышленных и жилых пространствах в условиях плотной городской застройки. При его оснащении соответствующими техническими средствами, может быть использован для: поиска и эвакуации (нейтрализации) опасных предметов (источников радиоактивного излучения, предметов, содержащих отравляющие вещества); проведения работ по обследованию объектов при наличии условий, исключающих пребывание человека (высокий радиационный фон, высокая степень загазованности, наличие отравляющих веществ), за исключением наличия паров агрессивных жидкостей;
Робот-сапёр. МРК "Сапер" предназначен для проведения разведки, контроля и идентификации взрывчатых веществ (ВВ), взрывчатых устройств (ВУ) и радиоактивного заражения, разминирования или уничтожения ВВ и ВУ во внутренних объемах различных транспортных средств, а также в ограниченных промышленных и жилых пространствах в условиях плотной городской застройки. При его оснащении соответствующими техническими средствами, может быть использован для: поиска и эвакуации (нейтрализации) опасных предметов (источников радиоактивного излучения, предметов, содержащих отравляющие вещества); проведения работ по обследованию объектов при наличии условий, исключающих пребывание человека (высокий радиационный фон, высокая степень загазованности, наличие отравляющих веществ), за исключением наличия паров агрессивных жидкостей;
 Самоходный лафетный ствол СЛС-100 (55) мод.228 "Сойка". Предназначен для тушения крупных пожаров с помощью воды и воздушно-механической пены низкой кратности в особо сложных условиях на крупных пожароопасных объектах. Ствол при работе на пожаре должен использоваться совместно с передвижной насосной станцией ПНС-110, рукавным автомобилем АР-2 и автомобилем с запасом пенообразователя (не менее 4000 л). Управление шасси танка и элементами лафетного ствола может осуществляться дистанционно по радиосвязи или с помощью кабельной связи на расстоянии до 100 м. Технические характеристики: шасси – танк Т-55; боевой расчет, чел. – 2; производительность л/с – 100; дальность подачи, м – 80-100; максимальная скорость, км/ч – 30; кратность ослабления воздействия ионизирующих излучений на экипаж – 10-20; масса, кг – 36500; габаритные размеры, мм – 6780 х 3270 х 3480.
Самоходный лафетный ствол СЛС-100 (55) мод.228 "Сойка". Предназначен для тушения крупных пожаров с помощью воды и воздушно-механической пены низкой кратности в особо сложных условиях на крупных пожароопасных объектах. Ствол при работе на пожаре должен использоваться совместно с передвижной насосной станцией ПНС-110, рукавным автомобилем АР-2 и автомобилем с запасом пенообразователя (не менее 4000 л). Управление шасси танка и элементами лафетного ствола может осуществляться дистанционно по радиосвязи или с помощью кабельной связи на расстоянии до 100 м. Технические характеристики: шасси – танк Т-55; боевой расчет, чел. – 2; производительность л/с – 100; дальность подачи, м – 80-100; максимальная скорость, км/ч – 30; кратность ослабления воздействия ионизирующих излучений на экипаж – 10-20; масса, кг – 36500; габаритные размеры, мм – 6780 х 3270 х 3480. Семейство наземных роботов TALON. Выпущено несколько сотен таких аппаратов в рамках программы создания робототехнической платформы, носимой человеком. Эти устройства, массой от 27 до 45 кг, применяются в задачах обезвреживания мин и бомб, разведки, обеспечения связи; имеются модели, оборудованные пулемётом М-249 и снайперской винтовкой Barrett. Все они способны перемещаться на местности с очень сложным рельефом в любую погоду. 250 таких роботов уже выполнили в Ираке и Афганистане около 50 тыс. миссий.
Семейство наземных роботов TALON. Выпущено несколько сотен таких аппаратов в рамках программы создания робототехнической платформы, носимой человеком. Эти устройства, массой от 27 до 45 кг, применяются в задачах обезвреживания мин и бомб, разведки, обеспечения связи; имеются модели, оборудованные пулемётом М-249 и снайперской винтовкой Barrett. Все они способны перемещаться на местности с очень сложным рельефом в любую погоду. 250 таких роботов уже выполнили в Ираке и Афганистане около 50 тыс. миссий. 
 Робот-пылесос
Робот-пылесос ШАГАЮЩАЯ МАШИНА ТИПА HEXAPOD. Конструкция машины создана на основе CAD-модели в пакете SolidWorks. Полученная модель позволила подобрать для опытного образца не только габаритные размеры, но и массу конструкции с учетом выбранного материала деталей, массу сервоприводов и дополнительной оснастки робота, а также рабочие зоны ног машины, С виртуальной модели была получена эскизная конструкторская документация для изготовления на станках с ЧПУ,
ШАГАЮЩАЯ МАШИНА ТИПА HEXAPOD. Конструкция машины создана на основе CAD-модели в пакете SolidWorks. Полученная модель позволила подобрать для опытного образца не только габаритные размеры, но и массу конструкции с учетом выбранного материала деталей, массу сервоприводов и дополнительной оснастки робота, а также рабочие зоны ног машины, С виртуальной модели была получена эскизная конструкторская документация для изготовления на станках с ЧПУ, БОЛОТНЫЙ ВЕЗДЕХОД. Машина, изображенная на снимке, на первый взгляд напоминает фантастического пришельца ив космоса. Однако назначение ее вполне земное и прозаическое — осушение болот и прокладка трубопроводов в заболоченной местности.
БОЛОТНЫЙ ВЕЗДЕХОД. Машина, изображенная на снимке, на первый взгляд напоминает фантастического пришельца ив космоса. Однако назначение ее вполне земное и прозаическое — осушение болот и прокладка трубопроводов в заболоченной местности.





