Спора нет: беспилотные автомобили действительно нужны - например, для работы в радиационно-опасных и т. п. зонах или для перевозки опасных грузов (вспомним рассказ "Плата за страх" о смертельно опасных перевозках легковзрывающегося нитроглицерина). Но это - относительно "мелкосерийные" применения беспилотных транспортных средств. Между тем, в последнее время СМИ всё чаще утверждая, что в недалёком будущем автомобили-робота оставят не у дел армию таксистов и дальнобойщиков. При этом как то умалчивается, что экономическая, да и социальная целесообразность такой замены сомнительна. Тогда для чего же в разработку автомобилей-беспилотников вкладываются колоссальные средства?
Обратим внимание на то, что ажиотаж на тему автомобилей-беспилотников совпал по времени с публикациями о скором внедрении автомобильных "черных ящиков". Поэтому вполне вероятно, что эти два явления тесно связаны между собой. А в качестве наиболее органичной связи здесь видится интеграция с целью возврата средств, вложенных в разработку беспилотных авто. Ну, например: серьёзная работа ведётся в том направлении, чтобы автомобиль-робот досконально соблюдал все Правила дорожного движения. И если это аппаратно-программное обеспечение для соблюдения ПДД будет встроено в автомобильный "черный ящик", то оно будет фиксировать все, даже малейшие, нарушения этих правил со стороны человека-водителя и, скорее всего, начнёт начислять ему штрафные баллы.
Но, конечно, не только это. Если взглянуть на дело глобальнее, то "черный ящик" - это, в перспективе, самый настоящий робот-полицейский. В самом деле: на планете сегодня бесконтрольно перемещаются сотни миллионов автомобилей, причем доля криминальной и террористической составляющей в этих перемещениях слишком велика (достаточно назвать только автомобили-убийцы, за рулём которых пьяные и обкурившиеся водители). Полиция всех стран "в ручном режиме" просто не в состоянии отследить всю эту составляющую. Причем дело осложняется тем, что, иногда полицейские коррумпированы, а иногда просто боятся - особенно, когда правонарушителями является "золотая молодёжь". А "черный ящик", если будет на то политическая воля международного сообщества, будет беспристрастен: сообщит обо всём куда следует, оштрафует по полной программе, а то и просто по дистанционной команде заблокирует двигатель.
Поэтому продуктивнее было бы не заниматься пустыми мечтами, а сосредоточиться на действительно нужных проектах. На наш взгляд, российской робототехнике поможет лидировать реализация многомиллиардного проекта аварийно-ликвидационного сверхтяжелого робота BRS 198-8, которым должна будет комплектоваться каждая действующая в мире АЭС. В случае аварии на атомной электростанции и в других экстремальных ситуациях (на химзаводах и т. п.) этот робот должен будет выполнить весь комплекс регламентных работ - от дезактивации до возведения саркофага, для чего ему понадобится многофункциональное навесное оборудование (в определенном смысле - российский аналог Lego Mindstorm Robolab). Для обеспечения универсальности BRS 198-8 ему понадобится огне-, химически- и радиационно-стойкая элементная база, телеуправление, сверхширокополосная связь (СШП), самодиагностика, системы искусственного интеллекта, лазерные резаки, уникальная ходовая часть, манипуляторы и т. д. Особенность электронной схемы такого робота, работающего в экстремальных условиях и в агрессивной среде - мультимедийный компаратор, в реальном времени сопоставляющий текущую обстановку с заложенными в его память неструктурированными данными по предыдущим авариям и чрезвычайным ситуациям. Но если японские, китайские, французские или американские роботостроители прежде российских запустят в серию модульный робот-ликвидатор BRS 198-8, то последний шанс будет утерян.
"АМУР-2" (Адаптивный Мобильный Универсальный Робот). Робот представляет собой автономную тележку, имеющую на борту программируемый контроллер, набор различных датчиков, исполнительные механизмы (эффекторы), модули связи с управляющим компьютером. Робот построен по модульному принципу, что позволяет использовать его компоненты и для других разработок. "АМУР-2" построен на основе однокристальной ЭВМ ATmega8515. Тактовой частоты 7 МГц и памяти 8 Кб достаточно не только для реализации управляющего автомата, но и для хранения более сложных поведенческих подпрограмм: езды по инверсной линии с самопересечениями, поиска источника света и др. Робот решает следующие задачи.

1. Моделирование условно-рефлекторного поведения. В ходе исследований понятие "Интеллектуального жилища" рассматривалось с точки зрения системы взаимодействующих, взаимнодрессирующихся (приспосабливающихся) компонент - как составляющих самого жилища, так и собственно жилища и его "обитателей". В основе управляющей программы лежал стохастический автомат. Действия автомат совершает в соответствии со стохастической матрицей Р. То есть, находясь в некотором состоянии q(t) и приняв на входе сигнал x(t), автомат переходит в состояние q(t + 1). При этом он совершает действие d, выбираемое из соответствующего вектора вероятностей - строки матрицы Р.
d(t +1) = F(P(t), x(t), q(t)), q(t + 1) = Q(x(t), q(t)).
Реакция автомата на входное воздействие оценивается - автомат "наказывается" либо "поощряется". Смысл реакции на сигнал "наказания/поощрения" заключается в изменении значений вероятностей выполняемых действий. Таким образом, с течением времени в ходе "дрессировки" автомат должен сформировать необходимые значения вероятностей действий. Характерным для поведения робота является наличие 'безусловных рефлексов'. В любом состоянии, выполняя то или иное действие, робот прежде всего анализирует сигналы от датчиков наивысшего приоритета, таких, как контактные датчики или датчик заряда аккумулятора. Скажем, решая задачу поиска линии, робот отреагрует на внезапно появившееся препятствие и начнёт маневр уклонения.
2. Псевдовзаимодействие роботов. Речь идёт о создании модели "обмена опытом", когда живущие в различных средах роботы могут обмениваться приобретёнными навыками (рефлексами). Были получены следующие модели.
- 1ГХ2Л-А ("Автоматы"). Рассматриваются роботы, управляемые вероятностными автоматами. Суть модели состоит в процедуре объединения матриц вероятностей действия. Роботы управляются ЭВМ, которая инициирует процесс объединения навыков, подаёт управляющие и обучающие воздействия на роботов.
- 1ГЧ2Л-НС ("Нейронные сети"). Аналогичная предыдущей, но вместо матрицы вероятностей используются нейронные сети. Для этой модели осуществляется обмен приобретёнными навыками. Теоретическим базисом является процедура композиции нейронных сетей.
3. Интеллектуальное поведение. Задача индуктивной классификации. Были исследованы вопросы применимости в робототехнике таких методов искусственного интеллекта, как эволюционное моделирование и метод правдоподобных рассуждений (ДСМ-метод). При этом в качестве задачи был выбран классический тест из регламента фестиваля мобильных роботов - движение по шоссе. Датчики полосы образованы 4-мя парами "ИК-приёмник/излучатель". Чтобы научить робота движению по полосе, необходимо было выработать набор соответствующих правил. которые, исходя из анализа состояния датчиков, выдавали бы необходимые управляющие сигналы. Для этого роботу требуется т. н. классификатор. В одной модели классификатор получался в результате эволюции популяции решающих правил (эволюционное моделирование), в другой он являлся результатом работы интеллектуальной процедуры - динамического ДСМ-метода. В отличие от классического ДСМ-метода, который работает с замкнутым множеством исходных примеров и заранее определёнными их свойствами, динамический ДСМ-метод позволяет работать в открытой среде с неизвестным заранее количеством примеров и автоматической классификацией примеров с помощью оценочной функции.
Технические характеристики робота: двигатели постоянного тока, скорость перемещения, см/с - 30; датчики полосы, ед. - 4; бесконтактные ИК-датчики обнаружения препятствий, ед. - 2 (дальность обнаружения - от 5 до 45 см, частота излучения 36 кГц, тип выхода - релейный, 3 зоны обнаружения препятствий); "глаза" для обнаружения маяков на расстоянии от 10 см до 4 м, ед. - 2; "пушка" для гашения активных маяков (дальность гашения маяка - до 50 см); модуль для воспроизведения звуков (общее время воспроизведения - 32 с, количество воспроизводимых фрагментов - 16, выбор фрагмента - комбинация из 4-х логических уровней, выходная мощность - 3 Вт); связь с компьютером через BlueTooth (Class 1, 100 м); питание - аккумулятор 12 В, 4 А*ч; время автономной работы, час - 3; габаритные размеры, мм - 400 х 190 х 250; вес, кг - 5.
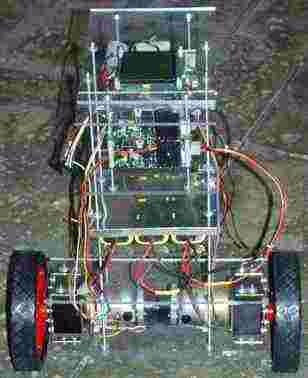
Научное направление: технические науки / автоматика, телемеханика, А7: «Робот транспортный с адаптивным управлением», технический проект выполненный студентами четвёртого курса Ижевского Индустриального техникума - транспортная платформа с системой адаптивного управления и телеметрией.. Данная транспортная платформа построена на двух однокристальных микроЭВМ марки PIC, запитанных от +5 В и работающих с частотой 4 МГц (данная частота обеспечивается внешним XT-генератором). XT-генератор состоит из кварцевого резонатора 4МГц и двух конденсаторов, подключенных к выводам osc1 и osc2.
Вся схема робота питается от бортовой сети робота 12 V.
К входам блока управления подключены следующие блоки и элементы:
Х1 — разъем для подключения программатора.
Х2 - разъем для подключения привода серводвигателя.
ХЗ — разъем для подключения блока радиоуправления робота.
Х4 - разъем для подключения блока привода.
Х5 - разъем для подключения питания 12 V.
Хб - разъем для подключения блока датчиков.
Х7 - разъем питания блока датчиков.
Каждый сигнал подаваемый с блока датчиков индуцируется, что помогает отлаживать управляющую программу. Так же такое управление роботом понятно человеку впервые встретившемуся с данным устройством.
Алгоритм работы робота заключается в движении транспортной платформы по заданной траектории и объезд встречающихся препятствий.
Обнаружение препятствий происходит с помощью инфракрасных датчиков. Инфракрасные датчики представляют собой пару ик-излучателей и пару ик-приемников. Одна пара излучатель-приемник контролирует наличие поверхности, другая наличие препятствий, соответствующие сигналы подаются на блок датчиков где преобразуются для понимания контроллером. Блок датчиков соединен с сопроцессором PIC16Р84A который анализирует сигналы с датчиков и подает их процессору, при этом каждый датчик контролирует наличие поверхности по которой движется робот и отсутствие препятствия (то есть если поверхности движения не будет сопроцессор сообщит процессору о наличии препятствия в ванном направлении).
Процессор работает в двух режимах: режим ожидания и активный режим.
В режиме ожидания процессор контролирует напряжение в аккумуляторах и считывает сигналы с разъема XЗ, также процессор должен держать привод отключенным (сигнал низкого уровня на выходе RC1). При подаче сигналов с блока радиоуправления робот анализирует и сохраняет полученную информацию (то есть дистанцию до объекта) и при появлении сигнала на RBЗ робот переходит в активный режим.
В активном режиме происходит активация привода (RC1 высокий уровень).
Начинается движение робота и считывание сигналов с сопроцессора. Если сигналов с сопроцессора нет то робот не двигается. Если появились сигналы с сопроцессора о наличии поверхности и отсутствия препятствий то робот активирует сервопривод, выводит его в среднее положение, выводит сигнал о направлении движения на драйвер привода (RC2) и начинает выдачу сигналов в драйвер (частота и количество сигналов определяют скорость и дистанцию пройденную роботом). При появлении препятствия с сопроцессора выдается сигнал который анализируется процессором. В соответствии алгоритму работы робот совершает необходимые действия для объезда препятствия (активирует серво привод и устанавливает его в положение отьезда от препятствия, совершает отъезд назад, и снова возвращает серво привод в исходное положение) и продолжает движение вперед. По достижению цели робот совершает разворот и продолжает движение в обратном направлении. При достижении начальной точки робот переходит в ждущий режим.
Актуальность разрабатываемой темы "Робот транспортный с адаптивным управлением" очень велика. Данная система может широко применяться на промышленном производстве в качестве автоматизированной транспортной платформы для доставки грузов, что позволяет высвободить человека от работы в опасных, тяжелых и вредных условиях. Также данный комплекс может применяться в качестве основного средства разведки и доставки оборудования в требуемую (зараженную) зону в поисково-спасательных и военных операциях, в службах МЧС для проведения видео исследования опасных и труднодоступных участков при поисково-спасательных операциях, а также службах МВД для обнаружения и исследования взрывоопасных объектов.
Представляемая система адаптивного управления отвечает следующим требованиям:
- объезд возникающих препятствий и возвращение на заданную траекторию;
- приход в заданную точку относительно первоначального положения;
- приход в заданную точку после сдвига относительно первоначального положения;
- полная автономность выполнения задания, адаптивное автоматическое управление в зависимости от окружающей обстановки;
- возможность принудительного изменения траектории движения посредством теле-радио управления;
- автоматический переход в режим адаптивного управления при не уверенном приеме теле-радио сигнала;
- надёжность и безотказность в работе;
- возможность дистанционного задания координат точки, в которую необходимо придти платформе;
- простота настройки и обслуживания;
- возможность дальнейшей модернизации и усовершенствования.
Новизна проекта: автоматический переход из режима радиоуправления в автономный адаптивный режим при срыве сигнала управления и обратный переход при восстановлении сигнала.
Основные идеи научно-исследовательского проекта: применение адаптивного управления транспортными роботами, применение практически ориентированной технологии обучения по специальности: «Автоматизация технологических процессов и производств», включающей практический блок: «изготовление действующих моделей».
Перспективы проекта: Более эффективное и безопасное проведение поисково-спасательных операций, создание гибких автоматизированных производств снабженных мобильными и не дорогими транспортными системами, оснащение стационарных больничных комплексов для выполнения функций младшего медицинского персонала (доставка мед. препаратов, замена судна). Области использования проекта: МЧС, МВД, спорт, автоматизированное производство, образование (увеличение заинтересованности и мотиваций студентов при обучении по специальности «Автоматизация технологических процессов и производств» - разработка конструкции и изготовление практических действующих моделей оборудования).
Интеллектуальный мобильный робот "Аргонавт-3". Робот "Аргонавт-3" (третье поколение) реализован по схеме с "дифференциальным приводом" и имеет предельную скорость движения 2 м/с. Робот имеет следующие подсистемы: центральное управляющее ядро, в котором реализованы функции планирования поведения робота; систему управления движением робота; систему оптических локаторов ИК-маяков (всенаправленный локатор и локатор дальнего радиуса действия); систему радиосвязи с удалённым компьютером (RadioEthernet, 11 Мб/с); систему технического зрения с функцией стереозрения и обработкой до 4-х камер.
Робот также может быть оснащен системой технического слуха. Программное обеспечение включает программы управления верхнего и нижнего уровней. Реализована клиент-серверная архитектура системы управления, специально разработанная для управления разными мобильными роботами с разным составом аппаратуры. Эта технология позволяет обеспечить большую гибкость и одновременно значительную унификацию управляющих программ и их программных интерфейсов. Обеспечено управление роботом через сеть Интернет. Робот предназначен для отработки решений фундаментальных проблем интеллектуальной мобильной робототехники, для использования в современных учебных процессах.
 Робот-официант.
Робот-официант. Делегации из Франции были вручены дипломы Оргкомитета и ФГУ НИИ РИНКЦЭ за активное участие в соревнованиях фестиваля “Роботы для людей” 2006 года. Кроме того, Приз зрительских симпатий достался участнице французской команды Элен Кокеле (Helene Coquelet), студентке Университета Версаля Сен-Квентин-в-Ивелинах (Universite de Versailles Saint-Quentin-en-Yvelines). Приз предоставлен некоммерческим партнерством «Инно-В». На подносе у французского робота-официанта - синее блюдечко с кусочками сахара. Во время соревнований при движении роботов по заданной траектории во время внезапных рывков и резких остановок блюдечко нередко у многих роботов падало, а сахар рассыпался. Но участники команд объясняли это тем, что на зрительные системы роботов воздействуют помехи от вспышек многочисленных фотоаппаратов зрителей и журналистов. Над проблемой обещали подумать к следующим соревнованиям.
 Транспортный модуль для робота-разведчика.
Транспортный модуль для робота-разведчика. Целью работы было создание транспортного модуля для природного и техногенного бездорожья. Технические характеристики модуля: длина, мм - 1330; ширина, мм - 780; высота, мм - 650; масса, кг - 48. Модуль разработан на базе следующих изобретений: колёсно-шагающего движителя (пат. 2038248 РФ) и шасси транспортного средства (а. с. 1576408 СССР).
 Автономный мобильный робот "Скиф".
Автономный мобильный робот "Скиф". Отличительные особенности: в системе управления роботом использованы принципиально новые позиционно-контурные алгоритмы и аппаратные решения, позволяющие, совместно с новым подходом к планированию траектории движения, значительно расширить функциональные возможности робота и повысить точность отработки заданий. Технические характеристики: максимальная скорость, м/с – 3; тип кинематической схемы – танковая; масса, кг - 50; длина, мм – 900; ширина, мм – 700; высота, мм – 1000.
 Высокоманевренный транспортный робот.
Высокоманевренный транспортный робот. Назначение разработки - роботизированное транспортное средство для перемещения объектов в стеснённых условиях автоматизированных промышленных производств, складов; платформа движитель для обслуживающих бытовых роботов. Применённый в транспортном средстве движитель, выполненный с использованием нескольких объединённых в группы по приводу сферических колёс (шароход), придаёт ему уникальные возможности по маневренности. Эти возможности в полной мере реализуются в роботизированном устройстве, оснащенном системой управления, позволяющей отрабатывать сложные алгоритмы одновременного (синхронного) управления четырьмя регулируемыми приводами.
Роботизированное транспортное средство может выполнять как простые перемещения (вперёд, назад, вправо, влево) по прямолинейным траекториям без каких-либо дополнительных маневров (поворотов, разворотов), так и очень сложные движения и перемещения. Например, при условном движении вперёд устройство способно мгновенно (если не учитывать инерцию) изменить направление траектории на движение вправо или влево. Как один из сравнительно простых вариантов движения может быть выполнено вращение вокруг средней точки. В качестве примеров более сложных траекторий можно привести следующие: движение по кривой с сохранением ориентации в глобальной системе координат; движение по кривой с обеспечением ориентации относительно кривой (например, с сохранением положения по касательной к линии в точке положения); движение по окружности; движение по прямой или кривой с одновременным вращением. На фото - вид платформы снизу.
 Робототехнический комплекс "Богомол".
Робототехнический комплекс "Богомол". Основное назначение - работа со взрывоопасными предметами. Технические характеристики: габариты подвижного аппарата, мм - 700 х 600 х 500 (мин), 1100 х 600 х 1700 (макс); вес подвижного аппарата, кг - 120; движитель - 6 гусениц шасси с изменяемой геометрией, двигатели шасси имеют обратную связь по скорости; скорость движения, м/с - 0-0,5; преодолеваемые препятствия - эскарпы (300 мм), лестница. уклон (30o); грузоподъёмность манипулятора, кг - 10; число степеней манипулятора - 5 + схват; зона действия манипулятора, мм - 1100; количество видеокамер - 3 с обогревом (передняя и задняя - ч/б, на схвате цветная) + 2 разъёма для дополнительных видеокамер; виды управления - командное, программное, автоматическое; передача информации - кабель 100 м; питание - аккумулятор 24 В (4 часа) или сеть 220 В 50 Гц.
При ликвидации последствий аварии на Чернобыльской АЭС были доставлены с помощью вертолёта и использовались:
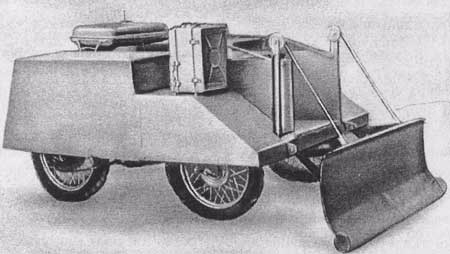
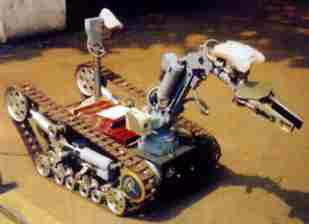
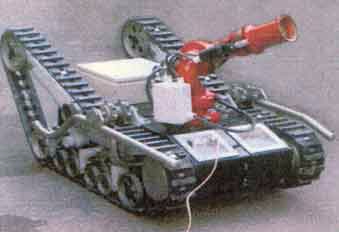
- радиоуправляемый тяжелый робот ТР-В1 с двигателем внутреннего сгорания, предназначенный для сборки и транспортировки радиоактивных сыпучих материалов;
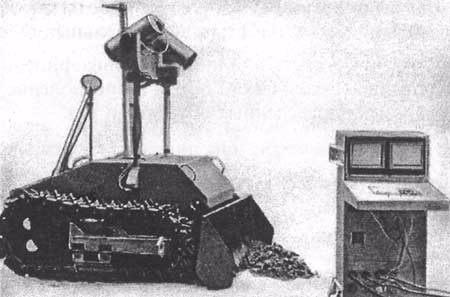
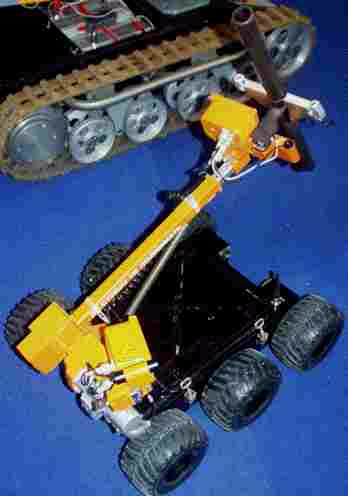
- тяжелый робот ТР-Г2: сверху — подвижные телевизионные камеры и другие сенсорные устройства, справа — пульт управления.
По книге Е. И. Юревича "Основы робототехники" (2-е издание)
 Мобильный робот LUCIAS.
Мобильный робот LUCIAS. Робот разработан для участия в международных соревнованиях мобильных роботов. Однако, созданный с применением современных информационных и инженерных технологий, робот может иметь широкое практическое применение. Робот представляет собой автономное устройство, снабженное бинокулярной системой технического зрения, бортовым компьютером для обработки информации, формирования в реальном масштабе времени программы движения в зависимости от текущей ситуации и целей, поставленных перед роботом, и управления приводами колес подвижной платформы. На борту робота размещены также источники питания и средства связи с оператором по радиоканалу. Робот представляет собой базовый модуль, который может быть оснащен специальными датчиками и манипуляторами в зависимости от решаемых задач.
 Универсальная мобильная платформа МП-М2301.
Универсальная мобильная платформа МП-М2301. За счет относительно большого диаметра колёс у данной платформы увеличен дорожный просвет, что даёт возможность использовать её вне помещений. Объём внутреннего приборного отсека позволяет устанавливать в него промышленные компьютеры формата РС/104. Технические характеристики платформы: длина, мм - 440; ширина, мм - 500; высота, мм - 350; вес, кг - 22; полезная нагрузка, кг - 25; максимальная скорость, м/с - 2; батареи - 2 шт. 12 В/12 А*ч.
 Роботизированный мобильный детектор взрывчатого вещества. MED
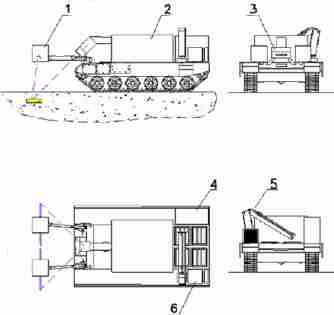
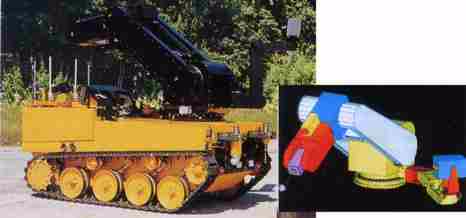
Роботизированный мобильный детектор взрывчатого вещества. MED (moving explosive detector) выполнен на шасси танка T-72. Обозначения на рисунке: 1)датчик частиц; 2) пыленепроницаемый контейнер; 3) облучающая головка; 4) источник переменного тока; 5) гидравлический подъемный кран; 6) водяная система охлаждения. Метод обнаружения и идентификации скрытых взрывчатых веществ включает следующие шаги.
1. Генерация гамма-пучка и облучение объектов.
2. Возбуждение реакций (1-3) в исследуемом веществе.
3. Регистрация вторичного излучения от фотоядерных реакций.
4. Обработка сигналов и идентификация вещества.
 Научно-исследовательский комплекс «Мобильные роботы».
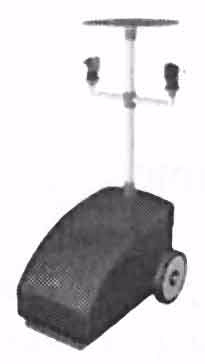
Научно-исследовательский комплекс «Мобильные роботы». Целью разработки является создание мобильного колесного робота, осуществляющего автономное патрулирование в жилых, торговых и складских помещениях. Мобильный робот предназначен для повышения эффективности охраны помещений и устранения проблем, связанных с человеческим фактором.
Данный тип мобильного робота обладает простым конструктивным решением, удобен для транспортировки и прост в эксплуатации. Оригинальные технические решения и современная элементная база обеспечивают высокие эксплуатационные характеристики мобильного робота. Использование данной разработки позволяет уменьшить затраты на обслуживающий персонал и окупить расходы уже через год.
Мобильный робот оснащен оптической системой локации, системой слежения за световыми маяками, системой слежения за полосой, системой обнаружения и обхода препятствий, системой подавления проскальзывания, системой передачи по радиоканалу информации о состоянии робота и внешней среды, системой сигнализации.
Система автоматического управления представляет собой многоуровневую архитектуру, состоящую из локального, тактического и стратегического уровней. На локальном уровне осуществляется управление двигательной системой робота, обработка информации, поступающей с измерительной системы, и ее передача на верхний уровень. На тактическом уровне задается требуемое поведение локальных САУ, производится контроль и передача информации о состоянии локальной САУ на стратегический уровень. На стратегическом уровне осуществляется выбор режима функционирования мобильного робота и выдача целеуказаний для тактического уровня.
Бортовая система управления мобильного робота решает следующие основные задачи: формирование и оценка навигационных параметров робота; обнаружение, захват и оценка координат маяков; наведение робота на маяк; наведение робота на полосу, ее захват и отработка; обнаружение и идентификация параметров препятствий; планирование движений мобильного робота; выбор режима функционирования или последовательности чередования режимов; сигнализация о задымлении помещения или о вторжении на территорию.
Выбор стратегии функционирования робота или определение последовательности решения задач производится в зависимости от задания, поставленного перед ним, и текущего состояния робота, т. е. от решаемой в данный текущий момент задачи и ее стадии решения. Смена режимов решаемых задач производится посредством анализа выполнения условий, установленных для каждого режима.
Основные технические параметры робота: габаритные размеры мобильного робота, мм – 450 (длина) х 300 (ширина) х 930 (высота); масса мобильного робота, кг – 20; время работы мобильного робота без подзарядки аккумуляторных батарей, час – 10; скорость мобильного робота, м/с – 1 (маршевая), 0,6 (маневрирования), 0,4 (позиционирования).
Мобильный робот осуществляет равноускоренное и равнозамедленное движение с ускорением 0,1 м/с2. Дальность работы оптического локатора достигает 12 м, а его угол обзора - 360°. Точность останова мобильного робота по осям: продольной - ±5 мм; поперечной - ±10мм. Максимальная абсолютная погрешность отработки траектории - ±10 мм. Система обнаружения и обхода препятствий обеспечивает дальность работы до 3 м. Угол обзора системы обнаружения и обхода препятствия - 150°. Распределение вычислительного времени представляет собой жесткое тактирование задачи. Такт работы подсистем нижнего уровня - 0,01 с, среднего уровня - 0,05 с и верхнего - 0,2 с.
Локальные системы управления реализованы на восьмибитных контроллерах. Тактический и стратегический уровни построены на основе шестнадцатиразрядного контроллера. Задание требуемого поведения мобильного робота и связь между уровнями его САУ осуществляется на основе открытого протокола RS-485 на физическом уровне и САN-протокола на информационном уровне.
 Мобильный робототехнический комплекс МРК-25.
Мобильный робототехнический комплекс МРК-25. МРК-25 "Кузнечик", базовый образец для построения семейства МРК. Использовался для ликвидации последствий радиационных аварий в г. Саров и в Чечне. Назначение - проведение взрывотехнических работ. Состав - шасси с изменяемой геометрией, электромеханическая трансмиссия, манипулятор, пост дистанционного управления, система управления, телекамеры.
 Многоцелевой робототехнический комплекс МРК-35МА.
Многоцелевой робототехнический комплекс МРК-35МА. Предназначен для прокладки кабеля и эвакуации роботов массой не более 250 кг (типа МР-3), для ведения погрузочно-разгрузочных работ, транспортирования предметов в мягких и жестких оболочках, эксплуатации в помещениях ограниченного объема. Состав:
- четырехгусеничное шасси с изменяемой геометрией;
- модуль гусеничного движителя изменяемой конфигурации;
- манипулятор, имеющий 5 степеней подвижности;
- электромеханическая трансмиссия;
- система управления;
- пост оператора;
- канал связи;
- 4 цветные телекамеры (одна с трансфокатором);
- система освещения.
Технические характеристики:
- масса, кг - 325;
- габариты (высота/ширина/длина), м - 0,9 х 0,65 х 0,8 (мин); 2,0 х 0,65 х 0,8 (макс);
- скорость передвижения, м/с - 0-0,2 (технологическая); 0-0,67 (транспортная);
- преодолеваемый подъем - 25° (продольный угол); 25° (поперечный угол); 35° (лестничный марш);
- преодолеваемое препятствие, м - 0,5;
- разворот на месте;
- длительность непрерывной работы, час - 3;
- энергообеспечение - 2 аккумулятора по 12В, 62 А*ч каждый;
- грузоподъемность манипулятора, кг - 20.
Пост дистанционного управления на транспортной тележке:
- масса, кг - 65;
- 2 цветных монитора 10".
 Робототехнический комплекс для разведки и тушения локальных пожаров МРК-ЛП. Т
Робототехнический комплекс для разведки и тушения локальных пожаров МРК-ЛП. Тактико-технические характеристики:
- максимальная скорость передвижения, м/с - 1,0;
- высота преодолеваемого порогового препятствия, мм - 300;
- грузоподъемность манипулятора, кг - 30 (120);
- наибольший радиус действия, м:
по радио - 2000;
по кабелю - 200;
- габаритные размеры, мм:
длина - 1300 (950);
ширина - 700;
высота - 800;
- масса в снаряженном состоянии, кг - 230-360;
- длительность непрерывной работы, не менее, ч - 4.
Семейство роботов PIAP.

1. Робот iNspector приводится в движение двумя двигателями постоянного тока. Манипулятор состоит из вращательного основания, двух независимых плеч (верхнего и нижнего) и захвата. Приводная система манипулятора защищена предохранительными муфтами, которые минимизируют последствия отдачи во время выстрела из пиротехнического выбрасывателя или ружья, а также последствий взрыва груза, находящегося в захвате.
Манипулятор имеет датчик силы зажатия захвата, датчики положения и функцию соблюдения постоянной ориентации в пространстве отдельных деталей во время движения остальных. Видеокамеры: главная, проезжая передняя, проезжая задняя, камера манипулятора. Технические характеристики робота: размеры со сложенным плечом (длина х ширина х высота), мм – 1710 х 670 х 1140; максимальная скорость, км/ч – 1; диапазон движения передних гусениц, град - ±30; преодоление лестницы, град – 35; допустимый боковой наклон, град – 22; манипулятор: число степеней свободы – 5 + сжатие челюстей; оборот основания, град - ±200; оборот запястья захвата, град - ±90; оборот челюстей захвата – не ограничен; ширина открытия челюстей, мм – 320; максимальная грузоподъёмность, кг - 60 (на сложенных плечах), 30 (на вытянутых плечах); галогенные осветители главной камеры, Вт – 2 х 20.

2. Робот eXpert. Зона обслуживания манипулятора с захватом – около 3м. На манипуляторе можно закрепить: рентгеновское устройство, устройство для выбивания автомобильных стёкол, противооткатное устройство с лазерным прицелом для пиротехнических выбрасывателей. 6 камер с осветителями (на фото видны яркие точки светодиодов) закреплены на захвате и на передних гусеницах, а также сзади и спереди робота.
Манипулятор имеет гнёзда закрепления «усов» для зрительной оценки расстояния, датчики крайних положений плеч, датчики положения основных степеней свободы, датчик силы зажима захвата. Видеокамеры: главная, две боковые передние, троллейная передняя, троллейная задняя, камера захвата. Технические характеристики робота: размеры со сложенным плечом (длина х ширина х высота), мм – 730 х 450 х 1000; максимальная скорость, км/ч – 2; диапазон движения передних гусениц – от горизонтальной позиции вверх, до 30o ниже уровня; преодоление лестницы, град – 25; допустимый боковой наклон, град – 29; манипулятор: число степеней свободы – 6 + сжатие челюстей; оборот основания, град - ±120; выдвижение верхнего плеча, мм - 600; оборот челюстей захвата – не ограничен; ширина открытия челюстей, мм – 350; максимальная грузоподъёмность, кг - 15 (на сложенных плечах), 5 (на вытянутых плечах); охват, мм - 2350 (от оси оборота), 2900 (от основания); галогенные осветители главной камеры, Вт – 2 х 20.

3. Мини-робот Scaut.
 Мобильная платформа.
Мобильная платформа. В состав комплекса входят: дистанционно-управляемое транспортное средство; бортовая система управления с комплексом навигационных датчиков; пульт оператора с радио- и телевизионным каналом связи. Технические характеристики: размеры, мм - 800 х 600 х 500; масса, кг - 95; макс скорость движения, м/с - 0,5; определение текущего местоположения с ошибкой: по линейным координатам, не более, см - 5; по угловой координате, град, не более - 2,0; режимы управления: автоматический; супервизорный; ручной. Особенности организации навигации: самоопределение местоположения платформы на априорно известном плане рабочей зоны, построение и автоматическая отработка траекторий с обеспечением безопасности движения.
8 октября 2005 г в пустыне Мохаве вновь состоятся гонки автомобилей без водителей. Один из внедорожников-роботов использует технологию стереоскопического компьютерного зрения, разработанную при участии нижегородского центра исследований Intel. Испытываемые в этих гонках методики могут спасти жизнь тысяч людей. 8 октября будет дан старт уникальному автопробегу по бездорожью: на Дальнем Западе США второй год подряд состоятся гонки по пустыне Мохаве, в которых примут участие автомобили без водителей, управляемые только компьютерами. Второй год подряд спонсором этого соревнования стала корпорация Intel, причем в этот раз под ее эгидой выступит не одна, а две команды: участница прошлогодних состязаний Carnegie Mellon Red (она вновь выведет на старт переделанную из внедорожника «Хаммер» машину Sandstorm, а также изготовленный на базе того же «Хаммера» автомобиль-робот H1ghlander) и команда Стэнфордского университета, которая переоборудовала соответствующим образом внедорожник «Фольксваген-Туарег R5».
В результате в автогонке под названием «Большой вызов-2005» примут участие не два – как в прошлом году, - а три автономных роботизированных наземных транспортных средства, построенных при участии корпорации Intel. Каждый из этих «железных коней» будет управляться компьютерами на базе процессоров Intel Pentium M и Intel Itanium 2. При этом робот-внедорожник Стэнфордского университета будет использовать еще и технологию стереоскопического компьютерного зрения (Intel OpenCV), код для которой написан специалистами нижегородского научно-исследовательского центра Intel.
Участвующие в гонке «Большой вызов» (Grand Challenge) автономные роботизированные наземные транспортные средства должны будут самостоятельно, без какого-либо вмешательства человека, прокладывать маршрут и ехать по трассе, преодолевая препятствия, каких в пустыне Мохаве немало: валуны, вулканические гребни, холмы, даже горы. От старта до финиша – расстояние в 175 миль (280 км), а уложиться надо в 10 часов, то есть передвигаться со средней скоростью не ниже 28 км/час. Задача осложняется тем, что точный маршрут команды узнают всего за два часа до того, как судья даст отмашку.
Впервые гонки автомобилей-роботов по бездорожью были организованы в марте прошлого года. В Grand Challenge-2004 приняли участие 15 машин, но ни одна из них не только не добралась до финиша, но и, по сути, недалеко ушла от стартовой линии. Дольше всех продержался на трассе, проехав при этом наибольшее расстояние - без малого 12 км, - тот самый Sandstorm, подготовленный к гонке группой специалистов из Института робототехники при университете им. Карнеги Меллона во главе со знаменитым ученым Уильямом Уиттекером по прозвищу «Ред» (William ‘Red’ Whittaker, отсюда и название команды – Carnegie Mellon Red).
«Тогда Sandstorm сошел с дистанции из-за своих плохих водительских навыков, – говорит Брэд Чен (Brad Chen), главный проектировщик подразделения Intel Performance Tools Lab. – Хоть он и преодолел наибольшее расстояние среди всех участников прошлогодней гонки, сравнение с водителем-человеком он не выдержал, будучи не в состоянии отличить проселочную дорогу, покрытую гравием, от шоссе. Для автомобиля-робота что суша, что вода – все одинаково, лишь бы была ровной поверхность, поэтому Sandstorm и не пытался обогнуть лужи с непролазной грязью или камнями на дне. Впрочем, что удивляться: в отличие от человека, который всем своим телом ощущает любую выбоину, торможение или ускорение, Sandstorm вынужден полагаться лишь на аппаратные и программные средства».
Таким образом, стоявший в прошлом году на кону один миллион долларов призовых никому не достался, что, впрочем, лишь повысило привлекательность Grand Challenge-2005: команда, чей робот-внедорожник сумеет-таки преодолеть всю дистанцию, сделав это за минимальное время, получит в награду два миллиона долларов.
Шансы на то, что на сей раз гонка автономных роботизированных наземных транспортных средств по пустыне Мохаве даст желаемый результат, заметно повысились: за истекшие полтора года энтузиасты автомобильной робототехники добились заметного прогресса, что подтвердили предварительные заезды, в ходе которых неделю назад были отобраны 20 машин, допущенных к старту 8 октября. Лучше всех при этом себя проявили три внедорожника, спонсируемые корпорацией Intel. Они быстрее других преодолели дистанцию и при этом прошли все контрольные точки и преодолели все препятствия, не допустив ни единой ошибки.
Помимо научного или сугубо спортивного, гонки Grand Challenge вызывают и серьезный практический интерес. Обучив автомобиль самостоятельной и, главное, безопасной езде, ученые и инженеры окажут неоценимую услугу всему человечеству. Уже сегодня на автомобильные аварии приходится 44% всех фактов случайной гибели людей, причем значительная доля таких аварий происходит из-за элементарных ошибок или невнимательности водителей. А к 2020 году, по некоторым прогнозам, ЧП на дорогах выйдут на третье место в списке злейших врагов рода людского, оставив позади преступность и войны. Эту угрозу можно предотвратить, наделив автомобиль способностью с помощью того же компьютерного зрения неусыпно контролировать действия как других участников дорожного движения, так и собственного водителя, вовремя напоминая ему о необходимости соблюдать скорость и ряд. Иными словами, в ходе гонок Grand Challenge испытываются методики, способные спасти жизнь и здоровье тысяч и тысяч людей. По пресс-релизу Intel
Семейство роботов REMOTEC. В зависимости от задачи роботы оснащаются оборудованием для обезвреживания артиллерийских снарядов, блоком рентгена, газодозирующим устройством, пробоотборником, химическим детектором, ружьём (дробовик 12 калибра) и т. д.

MK8 PLUS II. История робота уходит к началу событий в Северной Ирландии, он также использовался на Фолклендских островах и в Боснии. Зона досягаемости телескопической трубы - 3,6 м, подъёмная сила в вытянутом положении - 30 кг.

Mini-ANDROS II. Имеет двухметровую зону досягаемости и двойные клещи захватывающего устройства. Опционно - экстендер (удлинитель) камеры наблюдения с электрическим приводом.

ANDROS F6A. Характеризуется малой шириной (44,5 см) и хорошей скоростью - до 5,6 км/ч. Аудиосистема включает всенаправленный микрофон и дуплексную аудиосвязь с регулировкой громкости.

ANDROS MARK V-A1. При весе 275 кг имеет скорость 5,6 км/ч и грузоподъёмность 27 кг. Способен преодолевать канавы шириной 61 см, 45-градусные ступени и уклоны, уступы высотой 41 см.

WHEELBARROW REVOLUTION. Специально разработан для обследования подозрительных механизмов. Скорость удлинения телескопической трубы - 1,5 м/мин. Ширина размыкания тисков манипулятора - 100 мм, время замыкания/размыкания тисков - 4 с.
Оптико-телевизионная система позиционирования для управления микророботами и беспилотными летательными аппаратами в реальном времени разработана в ГНЦ ЦНИИ РТК. Система предназначена для автоматического определения ориентации и пространственного положения головы и/или руки оператора и служит для выполнения дистанционного целеуказания и наведения объектов. Состоит из платы, видеокамеры, реперного устройства и ПО. Система обеспечивает определение полной ориентации и положения объекта по 6 координатам (3 угла и 3 направления перемещения); погрешность линейных перемещений - 1% от дальности; погрешность определения ориентации - 40 угловых минут; частота выдачи координатной информации - 50 Гц; работа в условиях солнечной засветки до 75000 лк; максимальная удалённость от компьютера - 3 м.
 Робот РТК-05.
Робот РТК-05. Назначение - проведение радиационной разведки, поиск локальных источников гамма-излучения на труднодоступных участках местности, в промышленных и жилых помещениях; накопление, обработка и представление информации о радиационной обстановке в виде дозной картограммы по маршруту разведки и местоположении радиоактивных источников. Состав:
- дистанционно-управляемое транспортное средство, оснащенное манипулятором, комплексом приборов радиационной разведки (блок детектирования гамма поиска, блок детектирования гамма наведения, бортовая система управления) и системой технического стереозрения;
- мобильный пульт оператора с радиокомандным и телевизионным каналами связи.
Основные технические характеристики:
- максимальная скорость движения, м/с - 1.62;
- максимальная грузоподъемность манипулятора, кг - до 10;
- рабочий диапазон по мощности дозы гамма-излучения источника, Р/ч - от 30*10-6 до 103 (при поиске источника); от 2*10-3 до 104 (при наведении захватного устройства на источник);
- телевизионная система обеспечивает обзор спереди и сзади по ходу движения транспортного средства, а также обзор зоны работы манипулятора.
- время непрерывной работы, ч – 2;
- время приведения в готовность, мин – 30;
- габаритные размеры, мм – 1480 х 650 х 800;
- масса транспортного средства, кг – 300;
- масса пульта оператора, кг – 70.
Система технического стереозрения обеспечивает получение трехмерной информации об окружающей обстановке и ориентирование робота относительно наблюдаемых объектов:
- угол обзора телекамер, град – 60;
- глубина зоны стереовидения, м – 1-12;
- точность определения направлений на объекты, угл. мин – 10;
- точность определения расстояний, см – 5 (в ближней зоне от 1 до 4 м); 10 (в дальней зоне от 4 до 12 м).
 Тяжелый робот-манипулятор.
Тяжелый робот-манипулятор. Робот-манипулятор весом 7,5 т, используемый для уничтожения ядерных зарядов. В правой части рисунка – трёхмерная симуляция работы манипулятора.
 Универсальный помощник солдата.
Универсальный помощник солдата. Предназначен для автоматического ведения огня, наведения оружия на цель, как по собственным критериям, так и с использованием внешнего целеуказания. Грузоподъемность устройства 20 кг, время непрерывной работы в штатном режиме не менее 5 часов. Оборудован GPS-приемником, видеокамерой с сервоприводом, управляется по защищенному радиоканалу, использующему шумоподобные сигналы.
 Многофункциональный мобильный робототехнический комплекс сверхлёгкого класса "Вездеход ТМ5".
Многофункциональный мобильный робототехнический комплекс сверхлёгкого класса "Вездеход ТМ5". Технические характеристики:
- масса снаряженного робота, не более, кг – 50;
- диапазон регулирования скорости передвижения, м/с – 0-1,0;
- глубина преодолеваемой водной преграды, не более, м – 0,15;
- глубина преодолеваемого снежного покрова, не более, м – 0,08;
- число степеней подвижности манипулятора – 4;
- максимальное раскрытие губок схвата, мм – 120;
- усилие на губках схвата (два значения), Н – 100 и 200;
- максимальный вылет манипулятора от оси вращения, не менее, м – 1,2; 1,7 (со штангой удлинителем);
- угол поворота манипулятора в вертикальной плоскости, град. – 200;
- грузоподъёмность манипулятора, кг – до 5 (на вылете 1,0 м от оси); до 7 (на вылете 0,5 м от оси);
- визуальное распознавание предметов на расстоянии от МР, м – 1-50 (размерами от 0,1 до 3,0 м); 0,5-3,0 (размерами от 0,001 до 0,5 м);
- управление на расстоянии, м – 100 (200) по кабелю (с дополнительным кабелем); до 600 по радио;
- габаритные размеры в транспортном положении, не более, м – 0,7 (длина) х 0,55 (ширина) х 0,55 (высота);
- допустимый диапазон освещенностей для работы телесистемы, лк – 1-10000.
Робот преодолевает препятствия с грузом в схвате 5 кг:
- порог высотой до 0,14 м;
- косогор по курсу с углом наклона не более 20 град;
- склон в поперечном направлении с углом наклона не более 20 град.
1 ноября 2011 г. Робот вездеход совместного производства компании "Automotive Robotic Industry Ltd." и концерна RAFAEL. На вездеходе установлен пулемет калибра 7,62 мм, а управлять им можно дистанционно, находясь на расстоянии до 13 км от противника. Машина может тянуть на себе до полутоны различного оборудования и работать около 8 часов в абсолютно бесшумном и автономном режиме при помощи двух электрических батарей. В случае необходимости дополнительные 16 часов работы машине обеспечивает дизельный генератор. Кроме того, аппарат может плавать по воде, вне зависимости от глубины и погодных условий. По материалу BBC
 Двухколёсный прототип.
Двухколёсный прототип. Двухколёсный робот способный удерживать вертикальное положение в движении.
 Комплекс лёгкого класса "Варан" на гусеничном ходу.
Комплекс лёгкого класса "Варан" на гусеничном ходу. Предназначен для визуальной разведки, поиска и первичного диагностирования подозрительных предметов с помощью ТВ-камер и специального навесного оборудования. Комплекс может дистанционно обезвредить взрывное устройство или загрузить его в специальный контейнер для эвакуации. Может выполнить технологические операции по эвакуации автомобилей и других предметов, произвести осмотр днищ, салонов и багажных отделений транспортных средств, провести взрывотехнические операции, обеспечить наблюдение за ходом работ с помощью дополнительной выносной системы видеонаблюдения. Технические характеристики: скорость передвижения - 1 м/с; грузоподъёмность манипулятора - до 30 кг; длительность непрерывной работы на одном комплекте аккумуляторов - 4 час; дальность действия: через радиоканал - 1000 м, через кабельную линию - 200 м; масса мобильного робота - 180 кг.
 Комплекс сверхлёгкого класса "Вездеход-ТМ3" на колёсном ходу.
Комплекс сверхлёгкого класса "Вездеход-ТМ3" на колёсном ходу. Предназначен для проведения аудио- и видеоразведки объектов и территорий в условиях слабопересеченной местности, городской инфраструктуры и в помещениях. Может произвести осмотр днищ, салонов и багажных отделений транспортных средств, обеспечить доставку, установку и дистанционное приведение в действие разрушителей взрывоопасных устройств при любой освещенности, провести взрывотехнические операции. Технические характеристики: скорость передвижения - 1 м/с; грузоподъёмность манипулятора - до 5 кг; длительность непрерывной работы на одном комплекте аккумуляторов - до 75 мин; дальность действия: через радиоканал - 600 м, через кабельную линию - 75 м; масса мобильного робота - 40 кг. То, что этот робот действительно лёгкий и маневренный, мы имели возможность убедиться на стенде, немного поработав с ним от пульта управления: он очень послушно и точно выполняет команды
 Семейство сторожевых комплексов "Видеолокатор".
Семейство сторожевых комплексов "Видеолокатор". «Видеолокатор-БОТ G5» - это мобильный роботизированный комплекс, построенный на базе комплексной системы обеспечения безопасности, видеонаблюдения и аудиорегистрации «Видеолокатор». Данный робот может осуществлять круговой обзор при помощи четырех цветных видеокамер. При этом он способен детально рассмотреть любой объект на расстоянии до 1 км при помощи высококачественной скоростной поворотной камеры, которая может приблизить объект до 230х. Наружный микрофон позволяет фиксировать даже незначительные шумы. Четыре инфракрасных датчика движения активизируют робота, выводя его из режима сохранения энергии, а датчик дыма обеспечивает противопожарную защиту помещения. Видео- и аудиоинформация транслируется роботом на центральный пункт наблюдения по беспроводной сети Wi-Fi Ethernet. Управление роботом также происходит по беспроводной сети. Робот умеет патрулировать охраняемое помещение, передвигаясь по заданным маршрутам. Помимо траектории движения робота в маршруте заданы направления поворотов камеры и положения трансфокатора. При обнаружении движения или срабатывании датчика робот сообщит о происшедшем событии на пункт наблюдения; доклад может осуществляться голосом.
Робот имеет двухстороннюю аудиосвязь с пунктом наблюдения, благодаря чему может служить посредником в переговорах службы безопасности с нежелательными субъектами. Пункт наблюдения может находиться как на территории объекта, так и в любой точке мира, устанавливая соединение с роботом при помощи Интернета. Робот может комплектоваться GSM модемом, соединяясь с пунктом управления при помощи GPRS. «Видеолокатор - Бот 05» незаменим на крупных складах, где из-за большой высоты стеллажей трудно эффективно использовать потолочные камеры, а количество необходимых стационарных камер в проходах превышает разумные пределы. Может использоваться для детального осмотра потенциально опасных объектов. Во всепогодном исполнении пригоден для патрулирования открытых площадок объектов с повышенными требованиями к безопасности: в этом случае он может комплектоваться электрошоковым оружием и инфракрасными прожекторами.

«Видеолокатор БОТ G7» - более совершенная версия вышеописанного робота. Он оснащен четырьмя цветными видеокамерами для осуществления кругового обзора и четырьмя фарами, а также высокоскоростной поворотной камерой. По всем четырём бортам установлены детекторы расстояния. Четырёхколёсное шасси позволяет передвигаться по пересеченной местности. Робот дополнен манипулятором, имеющим 6 степеней свободы. Но самое интересное - он очень напоминает «торпеду» Фантомаса, изображенную на иллюстрации, с которой открывается очередной выпуск справочника "Кто есть кто в робототехнике".
Робот-репортёр Afghan Explorer. Предназначен передавать с линии огня изображения и звук. Четырёхколёсный тележурналист работает на солнечной энергии, имеет спутниковую навигацию и обменивается данными по Интернету. Аfghаn Ехрlоrеr, чем-то похож на газонокосилку. Его цель - проникать в зону боев, куда не могут попасть журналисты. С линии огня он будет передавать изображение, звуки и даже брать интервью. Идея создания Аfghаn Ехрlоrеr пришла в голову Крису Шикжентмихали, возглавляющему отделение Массачусетского технологического института Соmрuting Сulturе Grоuр. Робот-репортер, по мысли К. Шикжентмихали, покажет истинную картину происходящего на войнах, в которых участвуют США. Аfghаn Ехрlоrеr был создан по образу и подобию космического аппарата Mars Ехрlоrеr, разработанного НАСА для исследования «красной планеты». Он передвигается на четырех колесах, работает на солнечной энергии и ориентируется в пространстве с помощью системы GPS. «Мозг» робота представляет собой компьютер, подсоединенный к Интернету с помощью мобильного телефона. Таким образом, журналисты могут руководить действиями своего помощника, ориентируясь на изображение от двух веб-камер. Однако сам К. Шикжентмихали говорит, что его машина не в состоянии стать настоящим журналистом: «Человеческий фактор в журналистской работе очень важен. У робота этого фактора не будет».
 Робот Castor.
Робот Castor. Предназначен для работы в условиях радиационных рисков и в ограниченном пространстве. Технические характеристики: длина, м - 0,84; ширина, м - 0,59; высота, м - 0,50; вес, кг - 42; скорость, м/мин - от 0 до 45; рабочая дистанция, м - 200 (радио), 125 (кабель), питание, В - 24 (Ni/Cd батарея); время автономной работы, час - 1,5. Предназначен для технического оснащения отрядов и подразделений по ликвидации последствий техногенных аварий при выполнении работ в условиях химического и радиационного заражения в зонах с высокими уровнями радиации, а также в других условиях, опасных для жизни и здоровья человека.
 Робот LMF.
Робот LMF. Дистанционно-управляемое транспортное средство для осмотра, инспекций, обслуживания и отключения оборудования ядерной энергетики. Может преодолевать препятствия наподобие ступеней и рвов. Оборудован сверхмощным гидравлическим телеманипулятором Maestro грузоподъёмностью 100 daN, или, как вариант, гибким телеманипулятором МА23 копирующего типа (на нижнем рисунке - его задающая часть) с управлением по обратной связи и грузоподъёмностью 25 daN в комбинации с гидравлическим телеманипулятором "левая рука". Станция управления оснащена стереоскопическим монитором, показывающим объёмное видеоизображение, а также графическим экраном, показывающим трёхмерную симуляцию того, как робот входит в соп
Серия сообщений "Умный автомобиль":Транспортные средства в современной дорожной обстановке
Часть 1 - Car-Vision System
Часть 2 - "Черный ящик" в автомобиле - компонент интеллектуальной транспортной системы
Часть 3 - Возможно ли обмануть автомобильный "черный ящик"?
Часть 4 - БЕСПИЛОТНЫЕ АВТОМОБИЛИ - ОТВЛЕКАЮЩИЙ МАНЕВР СТОРОННИКОВ "ЧЕРНЫХ ЯЩИКОВ"?
Часть 5 - Контроль над транспортными потоками
Часть 6 - Бортовой модуль с учетом условий эксплуатации в салоне автомобиля
...
Часть 42 - Киберпланетарный редуктор
Часть 43 - Об "умных" автомобильных шинах
Часть 44 - Поддержат ли человекоподобные роботы-компаньоны людей с инвалидностью? Часть 24-я
Серия сообщений "Беспилотные автомобили / электромобили":Unmanned vehicles / electric vehicles
Часть 1 - БЕСПИЛОТНЫЕ АВТОМОБИЛИ - ОТВЛЕКАЮЩИЙ МАНЕВР СТОРОННИКОВ "ЧЕРНЫХ ЯЩИКОВ"?
Часть 2 - Как занять своё место в индустрии беспилотных электромобилей?
Часть 3 - СЕЛЬСКОХОЗЯЙСТВЕННЫЕ ЭЛЕКТРОМОБИЛИ
...
Часть 34 - Электромобили: оптимальнее, если они беспилотные
Часть 35 - Поддержат ли человекоподобные роботы-компаньоны людей с инвалидностью? Часть 8-я
Часть 36 - Поддержат ли человекоподобные роботы-компаньоны людей с инвалидностью? Часть 24-я

 Робот-официант. Делегации из Франции были вручены дипломы Оргкомитета и ФГУ НИИ РИНКЦЭ за активное участие в соревнованиях фестиваля “Роботы для людей” 2006 года. Кроме того, Приз зрительских симпатий достался участнице французской команды Элен Кокеле (Helene Coquelet), студентке Университета Версаля Сен-Квентин-в-Ивелинах (Universite de Versailles Saint-Quentin-en-Yvelines). Приз предоставлен некоммерческим партнерством «Инно-В». На подносе у французского робота-официанта - синее блюдечко с кусочками сахара. Во время соревнований при движении роботов по заданной траектории во время внезапных рывков и резких остановок блюдечко нередко у многих роботов падало, а сахар рассыпался. Но участники команд объясняли это тем, что на зрительные системы роботов воздействуют помехи от вспышек многочисленных фотоаппаратов зрителей и журналистов. Над проблемой обещали подумать к следующим соревнованиям.
Робот-официант. Делегации из Франции были вручены дипломы Оргкомитета и ФГУ НИИ РИНКЦЭ за активное участие в соревнованиях фестиваля “Роботы для людей” 2006 года. Кроме того, Приз зрительских симпатий достался участнице французской команды Элен Кокеле (Helene Coquelet), студентке Университета Версаля Сен-Квентин-в-Ивелинах (Universite de Versailles Saint-Quentin-en-Yvelines). Приз предоставлен некоммерческим партнерством «Инно-В». На подносе у французского робота-официанта - синее блюдечко с кусочками сахара. Во время соревнований при движении роботов по заданной траектории во время внезапных рывков и резких остановок блюдечко нередко у многих роботов падало, а сахар рассыпался. Но участники команд объясняли это тем, что на зрительные системы роботов воздействуют помехи от вспышек многочисленных фотоаппаратов зрителей и журналистов. Над проблемой обещали подумать к следующим соревнованиям.
 Транспортный модуль для робота-разведчика. Целью работы было создание транспортного модуля для природного и техногенного бездорожья. Технические характеристики модуля: длина, мм - 1330; ширина, мм - 780; высота, мм - 650; масса, кг - 48. Модуль разработан на базе следующих изобретений: колёсно-шагающего движителя (пат. 2038248 РФ) и шасси транспортного средства (а. с. 1576408 СССР).
Транспортный модуль для робота-разведчика. Целью работы было создание транспортного модуля для природного и техногенного бездорожья. Технические характеристики модуля: длина, мм - 1330; ширина, мм - 780; высота, мм - 650; масса, кг - 48. Модуль разработан на базе следующих изобретений: колёсно-шагающего движителя (пат. 2038248 РФ) и шасси транспортного средства (а. с. 1576408 СССР). Автономный мобильный робот "Скиф". Отличительные особенности: в системе управления роботом использованы принципиально новые позиционно-контурные алгоритмы и аппаратные решения, позволяющие, совместно с новым подходом к планированию траектории движения, значительно расширить функциональные возможности робота и повысить точность отработки заданий. Технические характеристики: максимальная скорость, м/с – 3; тип кинематической схемы – танковая; масса, кг - 50; длина, мм – 900; ширина, мм – 700; высота, мм – 1000.
Автономный мобильный робот "Скиф". Отличительные особенности: в системе управления роботом использованы принципиально новые позиционно-контурные алгоритмы и аппаратные решения, позволяющие, совместно с новым подходом к планированию траектории движения, значительно расширить функциональные возможности робота и повысить точность отработки заданий. Технические характеристики: максимальная скорость, м/с – 3; тип кинематической схемы – танковая; масса, кг - 50; длина, мм – 900; ширина, мм – 700; высота, мм – 1000.  Высокоманевренный транспортный робот. Назначение разработки - роботизированное транспортное средство для перемещения объектов в стеснённых условиях автоматизированных промышленных производств, складов; платформа движитель для обслуживающих бытовых роботов. Применённый в транспортном средстве движитель, выполненный с использованием нескольких объединённых в группы по приводу сферических колёс (шароход), придаёт ему уникальные возможности по маневренности. Эти возможности в полной мере реализуются в роботизированном устройстве, оснащенном системой управления, позволяющей отрабатывать сложные алгоритмы одновременного (синхронного) управления четырьмя регулируемыми приводами.
Высокоманевренный транспортный робот. Назначение разработки - роботизированное транспортное средство для перемещения объектов в стеснённых условиях автоматизированных промышленных производств, складов; платформа движитель для обслуживающих бытовых роботов. Применённый в транспортном средстве движитель, выполненный с использованием нескольких объединённых в группы по приводу сферических колёс (шароход), придаёт ему уникальные возможности по маневренности. Эти возможности в полной мере реализуются в роботизированном устройстве, оснащенном системой управления, позволяющей отрабатывать сложные алгоритмы одновременного (синхронного) управления четырьмя регулируемыми приводами. Робототехнический комплекс "Богомол". Основное назначение - работа со взрывоопасными предметами. Технические характеристики: габариты подвижного аппарата, мм - 700 х 600 х 500 (мин), 1100 х 600 х 1700 (макс); вес подвижного аппарата, кг - 120; движитель - 6 гусениц шасси с изменяемой геометрией, двигатели шасси имеют обратную связь по скорости; скорость движения, м/с - 0-0,5; преодолеваемые препятствия - эскарпы (300 мм), лестница. уклон (30o); грузоподъёмность манипулятора, кг - 10; число степеней манипулятора - 5 + схват; зона действия манипулятора, мм - 1100; количество видеокамер - 3 с обогревом (передняя и задняя - ч/б, на схвате цветная) + 2 разъёма для дополнительных видеокамер; виды управления - командное, программное, автоматическое; передача информации - кабель 100 м; питание - аккумулятор 24 В (4 часа) или сеть 220 В 50 Гц.
Робототехнический комплекс "Богомол". Основное назначение - работа со взрывоопасными предметами. Технические характеристики: габариты подвижного аппарата, мм - 700 х 600 х 500 (мин), 1100 х 600 х 1700 (макс); вес подвижного аппарата, кг - 120; движитель - 6 гусениц шасси с изменяемой геометрией, двигатели шасси имеют обратную связь по скорости; скорость движения, м/с - 0-0,5; преодолеваемые препятствия - эскарпы (300 мм), лестница. уклон (30o); грузоподъёмность манипулятора, кг - 10; число степеней манипулятора - 5 + схват; зона действия манипулятора, мм - 1100; количество видеокамер - 3 с обогревом (передняя и задняя - ч/б, на схвате цветная) + 2 разъёма для дополнительных видеокамер; виды управления - командное, программное, автоматическое; передача информации - кабель 100 м; питание - аккумулятор 24 В (4 часа) или сеть 220 В 50 Гц. - радиоуправляемый тяжелый робот ТР-В1 с двигателем внутреннего сгорания, предназначенный для сборки и транспортировки радиоактивных сыпучих материалов;
- радиоуправляемый тяжелый робот ТР-В1 с двигателем внутреннего сгорания, предназначенный для сборки и транспортировки радиоактивных сыпучих материалов; - тяжелый робот ТР-Г2: сверху — подвижные телевизионные камеры и другие сенсорные устройства, справа — пульт управления. По книге Е. И. Юревича "Основы робототехники" (2-е издание)
- тяжелый робот ТР-Г2: сверху — подвижные телевизионные камеры и другие сенсорные устройства, справа — пульт управления. По книге Е. И. Юревича "Основы робототехники" (2-е издание) Мобильный робот LUCIAS. Робот разработан для участия в международных соревнованиях мобильных роботов. Однако, созданный с применением современных информационных и инженерных технологий, робот может иметь широкое практическое применение. Робот представляет собой автономное устройство, снабженное бинокулярной системой технического зрения, бортовым компьютером для обработки информации, формирования в реальном масштабе времени программы движения в зависимости от текущей ситуации и целей, поставленных перед роботом, и управления приводами колес подвижной платформы. На борту робота размещены также источники питания и средства связи с оператором по радиоканалу. Робот представляет собой базовый модуль, который может быть оснащен специальными датчиками и манипуляторами в зависимости от решаемых задач.
Мобильный робот LUCIAS. Робот разработан для участия в международных соревнованиях мобильных роботов. Однако, созданный с применением современных информационных и инженерных технологий, робот может иметь широкое практическое применение. Робот представляет собой автономное устройство, снабженное бинокулярной системой технического зрения, бортовым компьютером для обработки информации, формирования в реальном масштабе времени программы движения в зависимости от текущей ситуации и целей, поставленных перед роботом, и управления приводами колес подвижной платформы. На борту робота размещены также источники питания и средства связи с оператором по радиоканалу. Робот представляет собой базовый модуль, который может быть оснащен специальными датчиками и манипуляторами в зависимости от решаемых задач. Универсальная мобильная платформа МП-М2301. За счет относительно большого диаметра колёс у данной платформы увеличен дорожный просвет, что даёт возможность использовать её вне помещений. Объём внутреннего приборного отсека позволяет устанавливать в него промышленные компьютеры формата РС/104. Технические характеристики платформы: длина, мм - 440; ширина, мм - 500; высота, мм - 350; вес, кг - 22; полезная нагрузка, кг - 25; максимальная скорость, м/с - 2; батареи - 2 шт. 12 В/12 А*ч.
Универсальная мобильная платформа МП-М2301. За счет относительно большого диаметра колёс у данной платформы увеличен дорожный просвет, что даёт возможность использовать её вне помещений. Объём внутреннего приборного отсека позволяет устанавливать в него промышленные компьютеры формата РС/104. Технические характеристики платформы: длина, мм - 440; ширина, мм - 500; высота, мм - 350; вес, кг - 22; полезная нагрузка, кг - 25; максимальная скорость, м/с - 2; батареи - 2 шт. 12 В/12 А*ч. Роботизированный мобильный детектор взрывчатого вещества. MED (moving explosive detector) выполнен на шасси танка T-72. Обозначения на рисунке: 1)датчик частиц; 2) пыленепроницаемый контейнер; 3) облучающая головка; 4) источник переменного тока; 5) гидравлический подъемный кран; 6) водяная система охлаждения. Метод обнаружения и идентификации скрытых взрывчатых веществ включает следующие шаги.
Роботизированный мобильный детектор взрывчатого вещества. MED (moving explosive detector) выполнен на шасси танка T-72. Обозначения на рисунке: 1)датчик частиц; 2) пыленепроницаемый контейнер; 3) облучающая головка; 4) источник переменного тока; 5) гидравлический подъемный кран; 6) водяная система охлаждения. Метод обнаружения и идентификации скрытых взрывчатых веществ включает следующие шаги.  Научно-исследовательский комплекс «Мобильные роботы». Целью разработки является создание мобильного колесного робота, осуществляющего автономное патрулирование в жилых, торговых и складских помещениях. Мобильный робот предназначен для повышения эффективности охраны помещений и устранения проблем, связанных с человеческим фактором.
Научно-исследовательский комплекс «Мобильные роботы». Целью разработки является создание мобильного колесного робота, осуществляющего автономное патрулирование в жилых, торговых и складских помещениях. Мобильный робот предназначен для повышения эффективности охраны помещений и устранения проблем, связанных с человеческим фактором. Мобильный робототехнический комплекс МРК-25. МРК-25 "Кузнечик", базовый образец для построения семейства МРК. Использовался для ликвидации последствий радиационных аварий в г. Саров и в Чечне. Назначение - проведение взрывотехнических работ. Состав - шасси с изменяемой геометрией, электромеханическая трансмиссия, манипулятор, пост дистанционного управления, система управления, телекамеры.
Мобильный робототехнический комплекс МРК-25. МРК-25 "Кузнечик", базовый образец для построения семейства МРК. Использовался для ликвидации последствий радиационных аварий в г. Саров и в Чечне. Назначение - проведение взрывотехнических работ. Состав - шасси с изменяемой геометрией, электромеханическая трансмиссия, манипулятор, пост дистанционного управления, система управления, телекамеры. Многоцелевой робототехнический комплекс МРК-35МА. Предназначен для прокладки кабеля и эвакуации роботов массой не более 250 кг (типа МР-3), для ведения погрузочно-разгрузочных работ, транспортирования предметов в мягких и жестких оболочках, эксплуатации в помещениях ограниченного объема. Состав:
Многоцелевой робототехнический комплекс МРК-35МА. Предназначен для прокладки кабеля и эвакуации роботов массой не более 250 кг (типа МР-3), для ведения погрузочно-разгрузочных работ, транспортирования предметов в мягких и жестких оболочках, эксплуатации в помещениях ограниченного объема. Состав: Робототехнический комплекс для разведки и тушения локальных пожаров МРК-ЛП. Тактико-технические характеристики:
Робототехнический комплекс для разведки и тушения локальных пожаров МРК-ЛП. Тактико-технические характеристики: 1. Робот iNspector приводится в движение двумя двигателями постоянного тока. Манипулятор состоит из вращательного основания, двух независимых плеч (верхнего и нижнего) и захвата. Приводная система манипулятора защищена предохранительными муфтами, которые минимизируют последствия отдачи во время выстрела из пиротехнического выбрасывателя или ружья, а также последствий взрыва груза, находящегося в захвате.
1. Робот iNspector приводится в движение двумя двигателями постоянного тока. Манипулятор состоит из вращательного основания, двух независимых плеч (верхнего и нижнего) и захвата. Приводная система манипулятора защищена предохранительными муфтами, которые минимизируют последствия отдачи во время выстрела из пиротехнического выбрасывателя или ружья, а также последствий взрыва груза, находящегося в захвате. 2. Робот eXpert. Зона обслуживания манипулятора с захватом – около 3м. На манипуляторе можно закрепить: рентгеновское устройство, устройство для выбивания автомобильных стёкол, противооткатное устройство с лазерным прицелом для пиротехнических выбрасывателей. 6 камер с осветителями (на фото видны яркие точки светодиодов) закреплены на захвате и на передних гусеницах, а также сзади и спереди робота.
2. Робот eXpert. Зона обслуживания манипулятора с захватом – около 3м. На манипуляторе можно закрепить: рентгеновское устройство, устройство для выбивания автомобильных стёкол, противооткатное устройство с лазерным прицелом для пиротехнических выбрасывателей. 6 камер с осветителями (на фото видны яркие точки светодиодов) закреплены на захвате и на передних гусеницах, а также сзади и спереди робота.  3. Мини-робот Scaut.
3. Мини-робот Scaut. Мобильная платформа. В состав комплекса входят: дистанционно-управляемое транспортное средство; бортовая система управления с комплексом навигационных датчиков; пульт оператора с радио- и телевизионным каналом связи. Технические характеристики: размеры, мм - 800 х 600 х 500; масса, кг - 95; макс скорость движения, м/с - 0,5; определение текущего местоположения с ошибкой: по линейным координатам, не более, см - 5; по угловой координате, град, не более - 2,0; режимы управления: автоматический; супервизорный; ручной. Особенности организации навигации: самоопределение местоположения платформы на априорно известном плане рабочей зоны, построение и автоматическая отработка траекторий с обеспечением безопасности движения.
Мобильная платформа. В состав комплекса входят: дистанционно-управляемое транспортное средство; бортовая система управления с комплексом навигационных датчиков; пульт оператора с радио- и телевизионным каналом связи. Технические характеристики: размеры, мм - 800 х 600 х 500; масса, кг - 95; макс скорость движения, м/с - 0,5; определение текущего местоположения с ошибкой: по линейным координатам, не более, см - 5; по угловой координате, град, не более - 2,0; режимы управления: автоматический; супервизорный; ручной. Особенности организации навигации: самоопределение местоположения платформы на априорно известном плане рабочей зоны, построение и автоматическая отработка траекторий с обеспечением безопасности движения. MK8 PLUS II. История робота уходит к началу событий в Северной Ирландии, он также использовался на Фолклендских островах и в Боснии. Зона досягаемости телескопической трубы - 3,6 м, подъёмная сила в вытянутом положении - 30 кг.
MK8 PLUS II. История робота уходит к началу событий в Северной Ирландии, он также использовался на Фолклендских островах и в Боснии. Зона досягаемости телескопической трубы - 3,6 м, подъёмная сила в вытянутом положении - 30 кг. Mini-ANDROS II. Имеет двухметровую зону досягаемости и двойные клещи захватывающего устройства. Опционно - экстендер (удлинитель) камеры наблюдения с электрическим приводом.
Mini-ANDROS II. Имеет двухметровую зону досягаемости и двойные клещи захватывающего устройства. Опционно - экстендер (удлинитель) камеры наблюдения с электрическим приводом. ANDROS F6A. Характеризуется малой шириной (44,5 см) и хорошей скоростью - до 5,6 км/ч. Аудиосистема включает всенаправленный микрофон и дуплексную аудиосвязь с регулировкой громкости.
ANDROS F6A. Характеризуется малой шириной (44,5 см) и хорошей скоростью - до 5,6 км/ч. Аудиосистема включает всенаправленный микрофон и дуплексную аудиосвязь с регулировкой громкости. ANDROS MARK V-A1. При весе 275 кг имеет скорость 5,6 км/ч и грузоподъёмность 27 кг. Способен преодолевать канавы шириной 61 см, 45-градусные ступени и уклоны, уступы высотой 41 см.
ANDROS MARK V-A1. При весе 275 кг имеет скорость 5,6 км/ч и грузоподъёмность 27 кг. Способен преодолевать канавы шириной 61 см, 45-градусные ступени и уклоны, уступы высотой 41 см. WHEELBARROW REVOLUTION. Специально разработан для обследования подозрительных механизмов. Скорость удлинения телескопической трубы - 1,5 м/мин. Ширина размыкания тисков манипулятора - 100 мм, время замыкания/размыкания тисков - 4 с.
WHEELBARROW REVOLUTION. Специально разработан для обследования подозрительных механизмов. Скорость удлинения телескопической трубы - 1,5 м/мин. Ширина размыкания тисков манипулятора - 100 мм, время замыкания/размыкания тисков - 4 с. Робот РТК-05. Назначение - проведение радиационной разведки, поиск локальных источников гамма-излучения на труднодоступных участках местности, в промышленных и жилых помещениях; накопление, обработка и представление информации о радиационной обстановке в виде дозной картограммы по маршруту разведки и местоположении радиоактивных источников. Состав:
Робот РТК-05. Назначение - проведение радиационной разведки, поиск локальных источников гамма-излучения на труднодоступных участках местности, в промышленных и жилых помещениях; накопление, обработка и представление информации о радиационной обстановке в виде дозной картограммы по маршруту разведки и местоположении радиоактивных источников. Состав:
 Тяжелый робот-манипулятор. Робот-манипулятор весом 7,5 т, используемый для уничтожения ядерных зарядов. В правой части рисунка – трёхмерная симуляция работы манипулятора.
Тяжелый робот-манипулятор. Робот-манипулятор весом 7,5 т, используемый для уничтожения ядерных зарядов. В правой части рисунка – трёхмерная симуляция работы манипулятора. Универсальный помощник солдата. Предназначен для автоматического ведения огня, наведения оружия на цель, как по собственным критериям, так и с использованием внешнего целеуказания. Грузоподъемность устройства 20 кг, время непрерывной работы в штатном режиме не менее 5 часов. Оборудован GPS-приемником, видеокамерой с сервоприводом, управляется по защищенному радиоканалу, использующему шумоподобные сигналы.
Универсальный помощник солдата. Предназначен для автоматического ведения огня, наведения оружия на цель, как по собственным критериям, так и с использованием внешнего целеуказания. Грузоподъемность устройства 20 кг, время непрерывной работы в штатном режиме не менее 5 часов. Оборудован GPS-приемником, видеокамерой с сервоприводом, управляется по защищенному радиоканалу, использующему шумоподобные сигналы. Многофункциональный мобильный робототехнический комплекс сверхлёгкого класса "Вездеход ТМ5". Технические характеристики:
Многофункциональный мобильный робототехнический комплекс сверхлёгкого класса "Вездеход ТМ5". Технические характеристики: Двухколёсный прототип. Двухколёсный робот способный удерживать вертикальное положение в движении.
Двухколёсный прототип. Двухколёсный робот способный удерживать вертикальное положение в движении. Комплекс лёгкого класса "Варан" на гусеничном ходу. Предназначен для визуальной разведки, поиска и первичного диагностирования подозрительных предметов с помощью ТВ-камер и специального навесного оборудования. Комплекс может дистанционно обезвредить взрывное устройство или загрузить его в специальный контейнер для эвакуации. Может выполнить технологические операции по эвакуации автомобилей и других предметов, произвести осмотр днищ, салонов и багажных отделений транспортных средств, провести взрывотехнические операции, обеспечить наблюдение за ходом работ с помощью дополнительной выносной системы видеонаблюдения. Технические характеристики: скорость передвижения - 1 м/с; грузоподъёмность манипулятора - до 30 кг; длительность непрерывной работы на одном комплекте аккумуляторов - 4 час; дальность действия: через радиоканал - 1000 м, через кабельную линию - 200 м; масса мобильного робота - 180 кг.
Комплекс лёгкого класса "Варан" на гусеничном ходу. Предназначен для визуальной разведки, поиска и первичного диагностирования подозрительных предметов с помощью ТВ-камер и специального навесного оборудования. Комплекс может дистанционно обезвредить взрывное устройство или загрузить его в специальный контейнер для эвакуации. Может выполнить технологические операции по эвакуации автомобилей и других предметов, произвести осмотр днищ, салонов и багажных отделений транспортных средств, провести взрывотехнические операции, обеспечить наблюдение за ходом работ с помощью дополнительной выносной системы видеонаблюдения. Технические характеристики: скорость передвижения - 1 м/с; грузоподъёмность манипулятора - до 30 кг; длительность непрерывной работы на одном комплекте аккумуляторов - 4 час; дальность действия: через радиоканал - 1000 м, через кабельную линию - 200 м; масса мобильного робота - 180 кг. Комплекс сверхлёгкого класса "Вездеход-ТМ3" на колёсном ходу. Предназначен для проведения аудио- и видеоразведки объектов и территорий в условиях слабопересеченной местности, городской инфраструктуры и в помещениях. Может произвести осмотр днищ, салонов и багажных отделений транспортных средств, обеспечить доставку, установку и дистанционное приведение в действие разрушителей взрывоопасных устройств при любой освещенности, провести взрывотехнические операции. Технические характеристики: скорость передвижения - 1 м/с; грузоподъёмность манипулятора - до 5 кг; длительность непрерывной работы на одном комплекте аккумуляторов - до 75 мин; дальность действия: через радиоканал - 600 м, через кабельную линию - 75 м; масса мобильного робота - 40 кг. То, что этот робот действительно лёгкий и маневренный, мы имели возможность убедиться на стенде, немного поработав с ним от пульта управления: он очень послушно и точно выполняет команды
Комплекс сверхлёгкого класса "Вездеход-ТМ3" на колёсном ходу. Предназначен для проведения аудио- и видеоразведки объектов и территорий в условиях слабопересеченной местности, городской инфраструктуры и в помещениях. Может произвести осмотр днищ, салонов и багажных отделений транспортных средств, обеспечить доставку, установку и дистанционное приведение в действие разрушителей взрывоопасных устройств при любой освещенности, провести взрывотехнические операции. Технические характеристики: скорость передвижения - 1 м/с; грузоподъёмность манипулятора - до 5 кг; длительность непрерывной работы на одном комплекте аккумуляторов - до 75 мин; дальность действия: через радиоканал - 600 м, через кабельную линию - 75 м; масса мобильного робота - 40 кг. То, что этот робот действительно лёгкий и маневренный, мы имели возможность убедиться на стенде, немного поработав с ним от пульта управления: он очень послушно и точно выполняет команды Семейство сторожевых комплексов "Видеолокатор". «Видеолокатор-БОТ G5» - это мобильный роботизированный комплекс, построенный на базе комплексной системы обеспечения безопасности, видеонаблюдения и аудиорегистрации «Видеолокатор». Данный робот может осуществлять круговой обзор при помощи четырех цветных видеокамер. При этом он способен детально рассмотреть любой объект на расстоянии до 1 км при помощи высококачественной скоростной поворотной камеры, которая может приблизить объект до 230х. Наружный микрофон позволяет фиксировать даже незначительные шумы. Четыре инфракрасных датчика движения активизируют робота, выводя его из режима сохранения энергии, а датчик дыма обеспечивает противопожарную защиту помещения. Видео- и аудиоинформация транслируется роботом на центральный пункт наблюдения по беспроводной сети Wi-Fi Ethernet. Управление роботом также происходит по беспроводной сети. Робот умеет патрулировать охраняемое помещение, передвигаясь по заданным маршрутам. Помимо траектории движения робота в маршруте заданы направления поворотов камеры и положения трансфокатора. При обнаружении движения или срабатывании датчика робот сообщит о происшедшем событии на пункт наблюдения; доклад может осуществляться голосом.
Семейство сторожевых комплексов "Видеолокатор". «Видеолокатор-БОТ G5» - это мобильный роботизированный комплекс, построенный на базе комплексной системы обеспечения безопасности, видеонаблюдения и аудиорегистрации «Видеолокатор». Данный робот может осуществлять круговой обзор при помощи четырех цветных видеокамер. При этом он способен детально рассмотреть любой объект на расстоянии до 1 км при помощи высококачественной скоростной поворотной камеры, которая может приблизить объект до 230х. Наружный микрофон позволяет фиксировать даже незначительные шумы. Четыре инфракрасных датчика движения активизируют робота, выводя его из режима сохранения энергии, а датчик дыма обеспечивает противопожарную защиту помещения. Видео- и аудиоинформация транслируется роботом на центральный пункт наблюдения по беспроводной сети Wi-Fi Ethernet. Управление роботом также происходит по беспроводной сети. Робот умеет патрулировать охраняемое помещение, передвигаясь по заданным маршрутам. Помимо траектории движения робота в маршруте заданы направления поворотов камеры и положения трансфокатора. При обнаружении движения или срабатывании датчика робот сообщит о происшедшем событии на пункт наблюдения; доклад может осуществляться голосом.
 Робот Castor. Предназначен для работы в условиях радиационных рисков и в ограниченном пространстве. Технические характеристики: длина, м - 0,84; ширина, м - 0,59; высота, м - 0,50; вес, кг - 42; скорость, м/мин - от 0 до 45; рабочая дистанция, м - 200 (радио), 125 (кабель), питание, В - 24 (Ni/Cd батарея); время автономной работы, час - 1,5. Предназначен для технического оснащения отрядов и подразделений по ликвидации последствий техногенных аварий при выполнении работ в условиях химического и радиационного заражения в зонах с высокими уровнями радиации, а также в других условиях, опасных для жизни и здоровья человека.
Робот Castor. Предназначен для работы в условиях радиационных рисков и в ограниченном пространстве. Технические характеристики: длина, м - 0,84; ширина, м - 0,59; высота, м - 0,50; вес, кг - 42; скорость, м/мин - от 0 до 45; рабочая дистанция, м - 200 (радио), 125 (кабель), питание, В - 24 (Ni/Cd батарея); время автономной работы, час - 1,5. Предназначен для технического оснащения отрядов и подразделений по ликвидации последствий техногенных аварий при выполнении работ в условиях химического и радиационного заражения в зонах с высокими уровнями радиации, а также в других условиях, опасных для жизни и здоровья человека. Робот LMF. Дистанционно-управляемое транспортное средство для осмотра, инспекций, обслуживания и отключения оборудования ядерной энергетики. Может преодолевать препятствия наподобие ступеней и рвов. Оборудован сверхмощным гидравлическим телеманипулятором Maestro грузоподъёмностью 100 daN, или, как вариант, гибким телеманипулятором МА23 копирующего типа (на нижнем рисунке - его задающая часть) с управлением по обратной связи и грузоподъёмностью 25 daN в комбинации с гидравлическим телеманипулятором "левая рука". Станция управления оснащена стереоскопическим монитором, показывающим объёмное видеоизображение, а также графическим экраном, показывающим трёхмерную симуляцию того, как робот входит в соп
Робот LMF. Дистанционно-управляемое транспортное средство для осмотра, инспекций, обслуживания и отключения оборудования ядерной энергетики. Может преодолевать препятствия наподобие ступеней и рвов. Оборудован сверхмощным гидравлическим телеманипулятором Maestro грузоподъёмностью 100 daN, или, как вариант, гибким телеманипулятором МА23 копирующего типа (на нижнем рисунке - его задающая часть) с управлением по обратной связи и грузоподъёмностью 25 daN в комбинации с гидравлическим телеманипулятором "левая рука". Станция управления оснащена стереоскопическим монитором, показывающим объёмное видеоизображение, а также графическим экраном, показывающим трёхмерную симуляцию того, как робот входит в соп





